Dobot Blockli je programska platforma zasnovana na Google Blockli. U ovom procesu, korisnici mogu programirati kroz format slagalice, koji je jednostavan i lako razumljiv. Takođe, korisnici mogu koristiti integrisani API Dobota u bilo kom trenutku.
12.1 Blokli interfejs
Otvorite DobotStudio i kliknite na DobotBlock Lab:
12.2 Blok kod
12.3 Inicijalizacija i definisanje problema
Kontekst i motivacija
U modernoj industriji i ekologiji, ručno sortiranje otpada je spor, neefikasan i često opasan proces. Cilj ovog projekta je da se stvori autonomni sistem koji koristi kompjuterski vid i robotsku manipulaciju za prepoznavanje i fizičko odvajanje različitih materijala (u ovom slučaju organskog otpada i plastike).
Izjava o problemu
Primarni izazov leži u sinhronizaciji tri nezavisna podsistema:
1. Transportni sistem: Pokretna traka koja donosi predmete u radni prostor.
2. Senzorski sistem: Kamera koja mora da identifikuje tip predmeta u realnom vremenu.
3. Sistem za aktiviranje: Robotska ruka koja mora precizno izvršiti branje i postavljanje na osnovu povratnih informacija senzora.
KSNUMKS Arhitektura rešenja
Rešenje je zasnovano na platformi Dobot Magician i programskom okruženju zasnovanom na blokovima (Blockli) koje integriše AI module za prepoznavanje slika.
Hardverske komponente
- Dobot Magician Arm: Visoko precizni 4-osni robot.
- Usisna čaša: Koristi se kao krajnji efektor za svoju svestranost u rukovanju različitih oblika.
- USB kamera: Montiran iznad pojasa za stabilan pogled odozgo na dole.
- Transportna traka: Kontroliše se preko koračnog motora povezanog sa Dobotom.
Softver Logika
Algoritam prati iterativni model zatvorene petlje: Start Belt -> Stop -> Capture -> Analyze -> Sort -> Return to Home.
12.5 Detaljna analiza bloka koda
Program je podeljen u četiri ključna segmenta:
Konfiguracija (podešavanje)
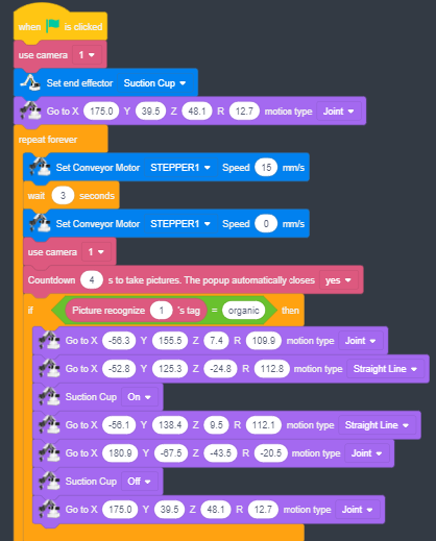
- koristite kameru 1: Objavljuje hardverski ulaz za vizuelne podatke.
- Set end effector [Suction Cup]: Soft-mapira kontrolu vazdušne pumpe na izlazu robota.
- Idi na Ks:175, I:39.5, Z:48.1: Ovo je "Bezbednosna pozicija". Robot se povlači kako bi izbegao ometanje kamere i obezbeđuje optimalan put do bilo koje tačke na pojasu.
Logistika (kontrola transportera)
Unutar bloka ponavljanja zauvek:
- Set transportni motor [STEPPER1] Brzina 15 mm / s: Aktivira pojas kontrolisanom brzinom kako bi se sprečilo klizanje lakih predmeta.
- sačekajte 3 sekunde: Kritična vremenska konstanta koja definiše rastojanje između stavki.
- Brzina KSNUMKS: Zaustavlja pojas tako da robot može da izvrši precizan "statički izbor".
AI inspekcija (prepoznavanje slike)
- Odbrojavanje 4 s: Obezbeđuje vreme stabilizacije za kameru da se fokusira i za AI popup za obradu slike.
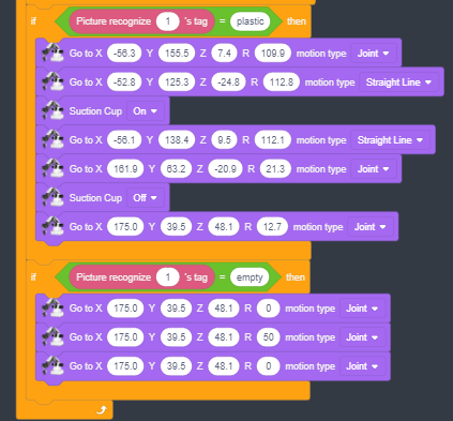
- Ako slika prepozna oznaku KSNUMKS-a = [organski / plastični]: Poziva API za duboko učenje da uporedi trenutni okvir sa obučenim skupom podataka i vraća oznaku klase.
Kinematika i manipulacija
Za svaku granu (organska / plastična), sistem koristi dva tipa kretanja:
1. Zajedničko kretanje (PTP): Pomera sve zglobove istovremeno za najbrži point-to-point putovanja.
2. Ravna linija (linearna): Pomera ruku strogo vertikalno na Z-osi kako bi se osiguralo da usisna čaša čini savršen kontakt bez kucanja stavku preko.
12.6 Operativni algoritam (korak po korak)
· POČETAK: Inicijalizujte instrumente i podesite krajnji efektor.
· TRANSPORT: Pomerite pojas za 3 sekunde, a zatim zaustavite.
· SENSE: Snimanje slike i identifikuju oznaku preko AI.
· ODLUKA:
· Ako organski: Pomerite se da zgrabite koordinate, uključite usisavanje, pređite na organsku kantu, isključite usisavanje.
· Ako je plastika: Pomerite se da biste zgrabili koordinate, uključite usisavanje, pređite na plastičnu kantu, isključite usisavanje.
· Ako je prazan: Izvršite signalni "shake" pokret (rotiranje R-ose).
· RESET: Povratak na početne koordinate bezbednosti.
· LOOP: Ponavljajte ciklus na neodređeno vreme.
12.7 Tehničke specifikacije koordinata
Na osnovu skripte kalibrisane su sledeće koordinate:
|
Tačka |
X (mm) |
Y (mm) |
Z (mm) |
R (°) |
Pretraga |
|
O NAMA |
175.0 |
39.5 |
48.1 |
12.7 |
Stanje mirovanja / čekanja |
|
Pristup |
-56.3 |
155.5 |
7.4 |
109.9 |
Položaj iznad stavke |
|
Pretraživanje |
-52.8 |
125.3 |
-24.8 |
112.8 |
Kontakt tačka (spuštena) |
|
Organska kanta za smeće |
180.9 |
-67.5 |
-43.5 |
-20.5 |
Odlaganje organskih materija |
|
Plastična kanta |
161.9 |
63.2 |
-20.9 |
21.3 |
Odlaganje plastike |
12.8 Rešavanje problema sa implementacijom
· Netačno hvatanje: Uverite se da je stavka centrirana. Ako se razlikuje, koristite vodiče na pojasu ili integrišite dinamičke Ks / I povratne informacije iz AI kamere.
· Greške u klasifikaciji: AI prepoznavanje je osetljivo na svetlost. Koristite boju pojasa visokog kontrasta i konzistentno spoljno LED osvetljenje.
· Bezbednost: Uvek proverite da li je radni prostor čist od prepreka pre nego što započnete ponavljanje zauvek petlje.
Last modified: Saturday, 20 June 2026, 8:05 AM