1.1 PiRacer Uputstvo za montažu
Dijagram vijaka / odstupanja
Dijagram za referencu. Imajte na umu da su šrafovi koji dolaze sa servo točkom nisu navedeni ovde.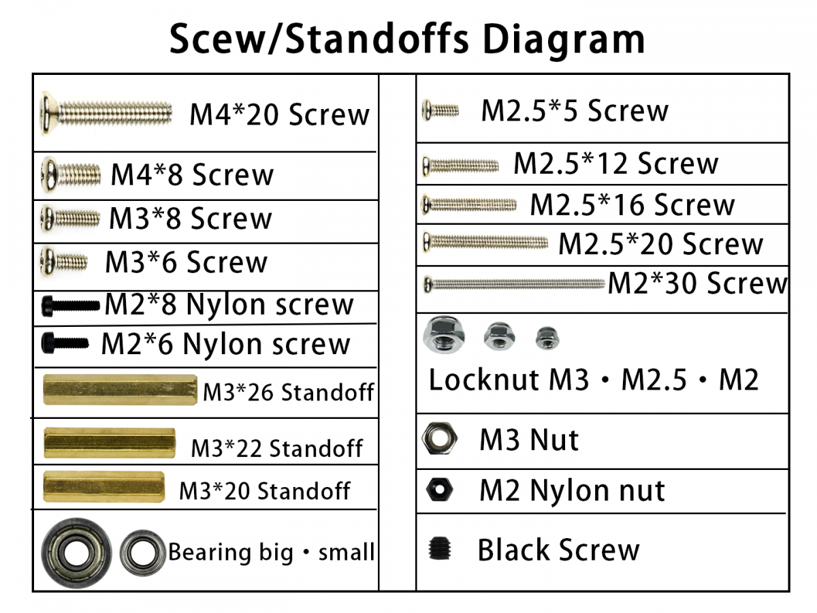
1. Pričvrstite motore na metalnu šasiju
Napomena: Nemojte koristiti M3 * 8. To je duže i može oštetiti motor.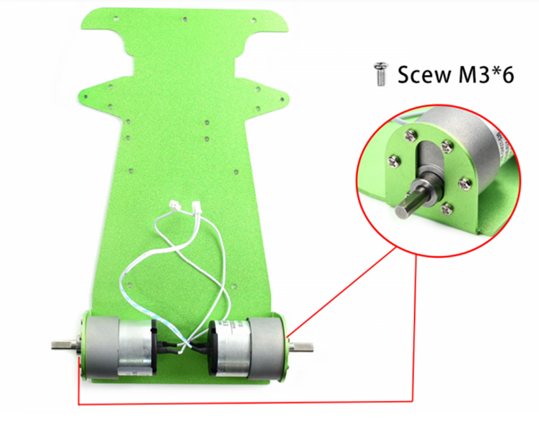
2. Dodajte spojnice na točkove
Prvo, ubacite crni vijak u spojnicu. Zatim dodajte spojnicu na točak. Možda ćete morati da pritisnete spojnicu u točak. Pričvrstite spojnicu na točak pomoću M4 * 8 vijka.

3. Sastavite točkove
Zategnite crni vijak da biste pričvrstili spojnicu na ravnu stranu osovine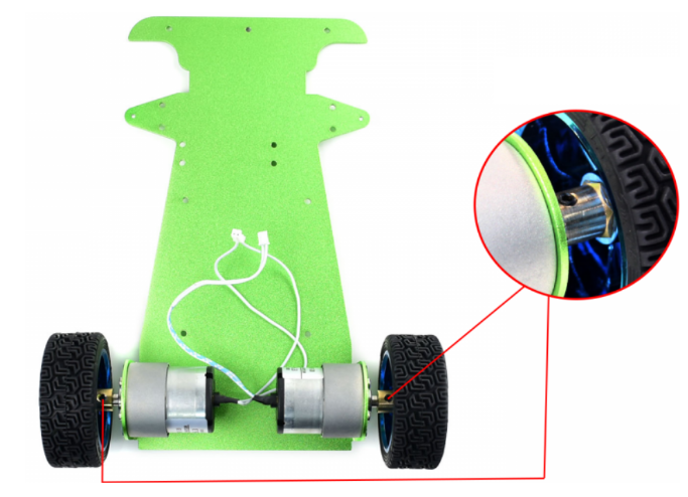
4. Montirajte držač servo na metalnu šasiju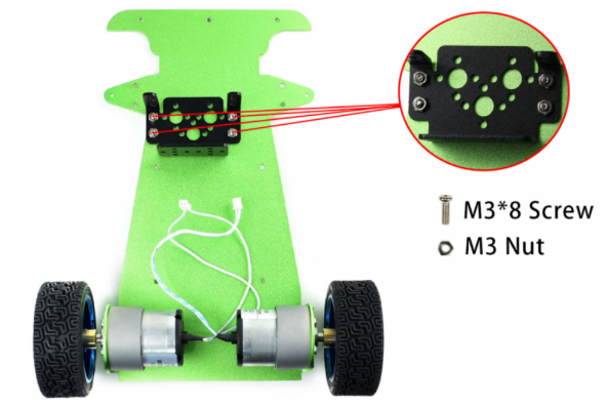
5. Pričvrstite servo na držač i pomoću vijaka i matica
Proverite da li je servo ispravno. Spoljna osovina treba da bude u centru.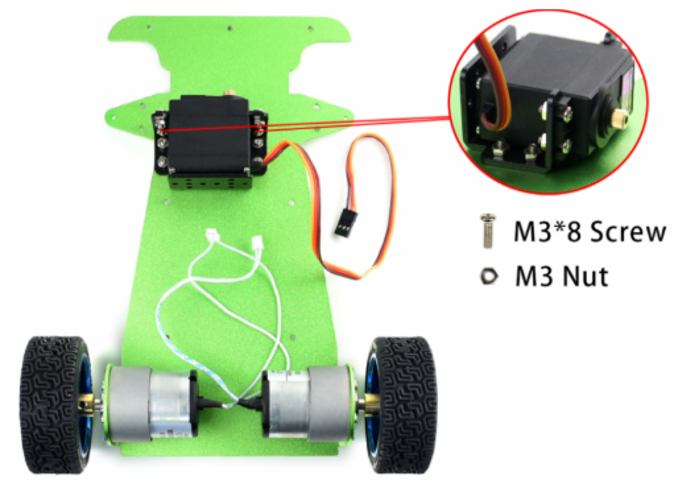
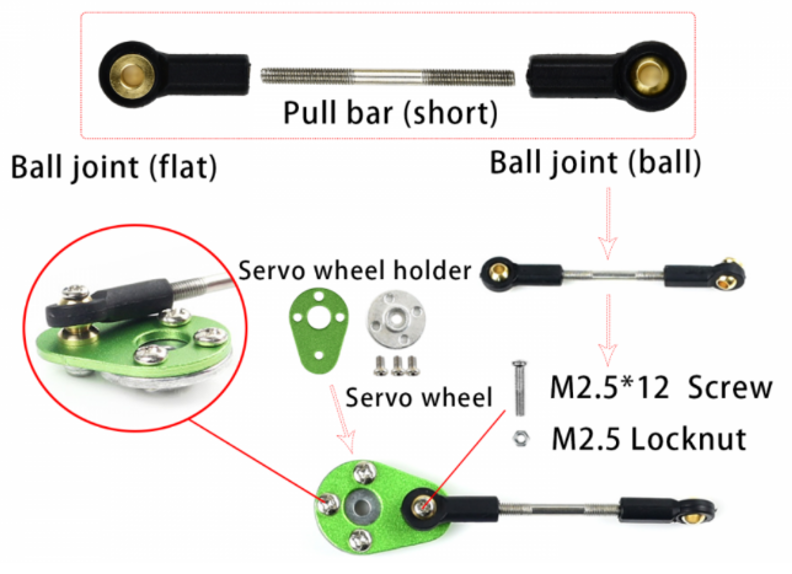
6. Sastavite servo vučnu šipku
Pull bar se kombinuje pomoću dva kuglična zgloba, jedan ravan i jedna lopta, i kratka šipka. Dva kuglična zgloba treba da budu okomita jedna na drugu. Pričvrstite servo točak (rog) na držač servo točka pomoću vijaka koji ste dobili sa servo točkom. Zatim pričvrstite ravni kuglični zglob na držač servo točka. Imajte na umu da je žleb servo točka je prema spolja.
7. Sastavite vučnu šipku prednjeg točka i zglobove upravljača
Prednji točak vučna šipka se kombinuje pomoću dva kuglična zgloba i duge šipke. Zatim stavite ležajeve u zglobove upravljača. Svaki zglob treba mali i veliki ležaj.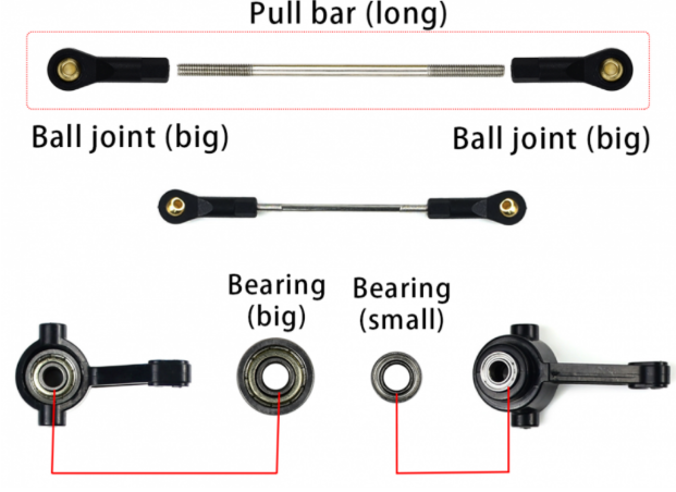
8. Sastavite servo pull bard, prednji točkovi pull bard, i zglobovi upravljača
Pričvrstite servo pull bar na vrhu, a zatim prednji točak pull bar, i na kraju zglobova. Veći ležaj treba prema unutra.
9. Pričvrstite točkove na zglob upravljača
Matica treba da bude na spoljnoj strani točka, nasuprot zgloba. Uverite se da točak nije previše zategnut ili previše labav. Testirajte točak da biste bili sigurni da može slobodno da se kreće.
10. Dodajte M3 standoffs za prednje točkove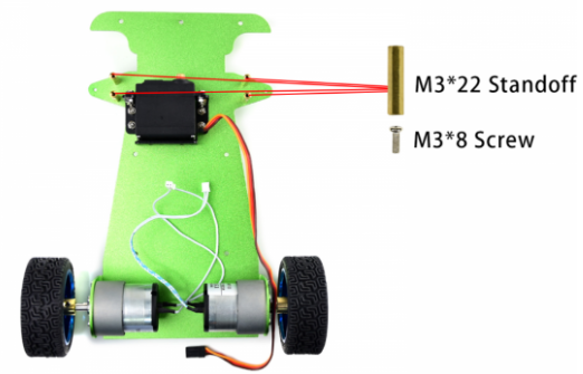
11. Sastavite kombinaciju prednjih točkova
Stavite servo točak na servo, pričvrstite ga pomoću M3 vijka. Pričvrstite točkove pomoću M2 vijaka i kontra matice i trougla ploče. Prednji točkovi treba da budu ravno napred. Podesite dugu traku za povlačenje ako je potrebno.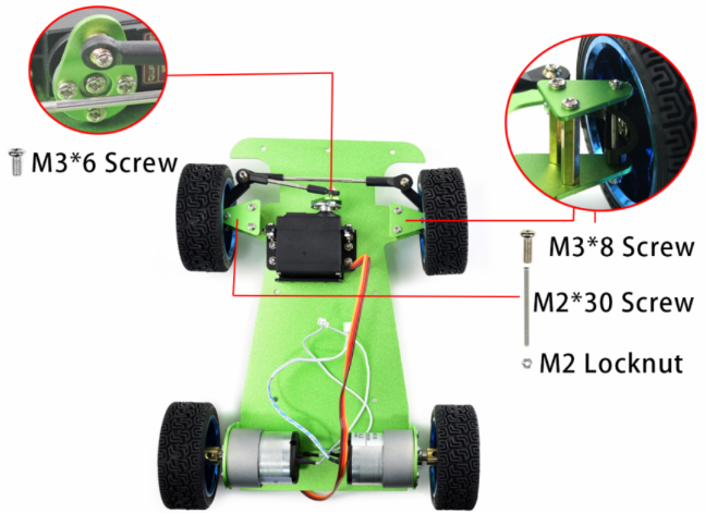
Prednji točkovi treba da budu ravno napred. Podesite dugu traku za povlačenje ako je potrebno.
12. Dodajte standoffs za PiRacer Ekpansion odbora i branik
Ubacite EVA filc jastučiće za branik i PiRacer Ekpansion odbor.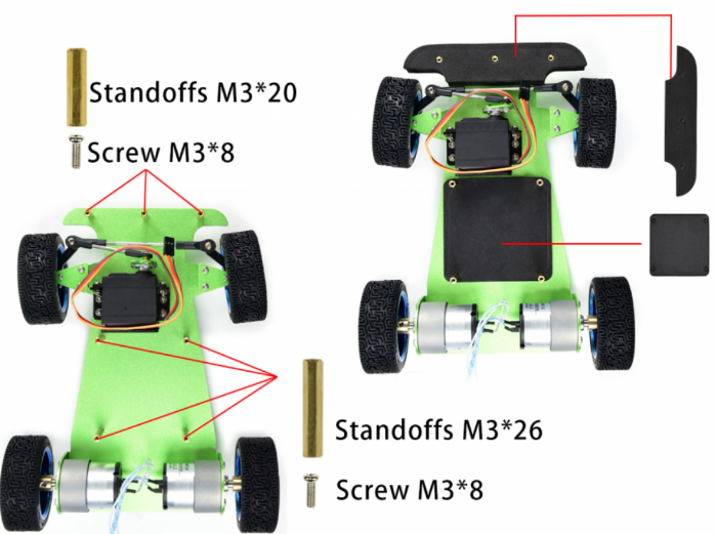
13. Pričvrstite držač kamere na PiRacer Ekpansion ploču.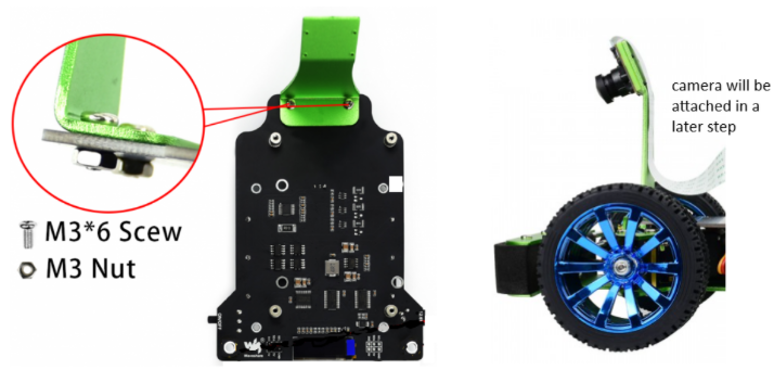
14. Umetnite baterije u pravom smeru
Povežite žice motora i servo na PiRacer Ekpansion odbor.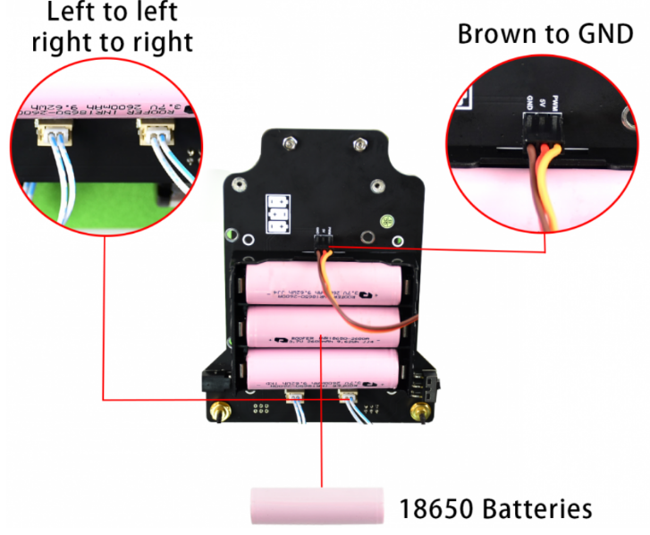
15. Pričvrstite ploču za proširenje i metalni branik
Podesite položaj motora i servo žica i pričvrstite PiRacer Ekpansion ploču na metalnu šasiju i pričvrstite metalni branik.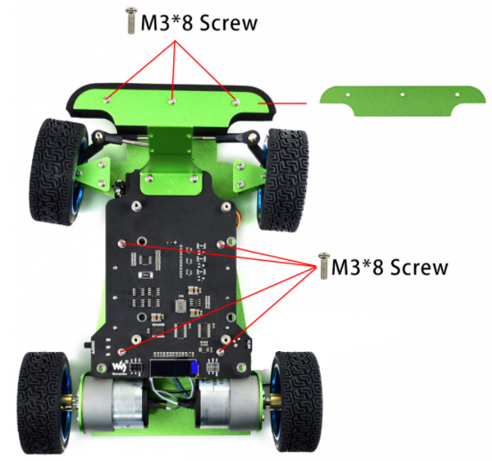
16. Montirajte kameru na držač pomoću najlonskih vijaka
Napomena: Akrilna ploča treba da bude između kamere i metalnog držača kako bi se izbeglo kratko spajanje.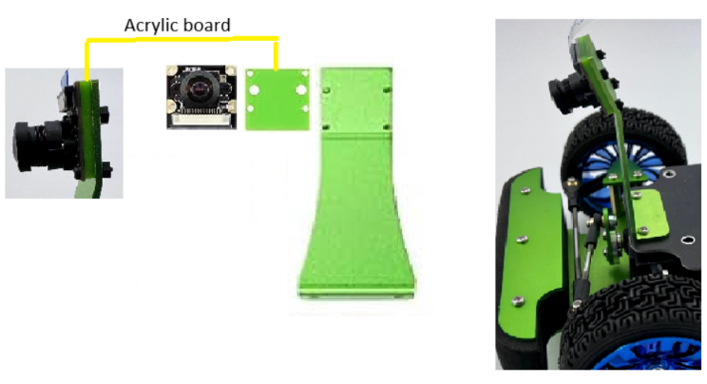
17. Pričvrstite kućište motora 3D-štampano na DC motore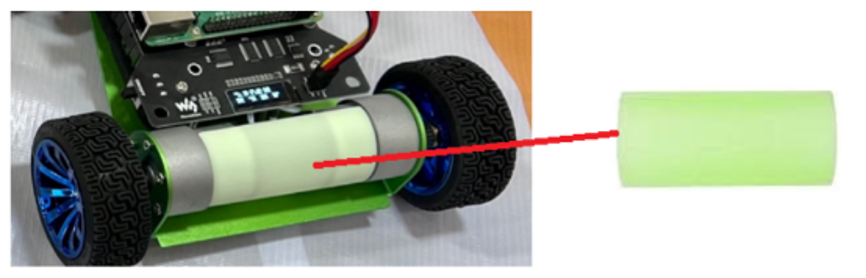
18. Isključite Raspberri Pi i isključite punjač iz PiRacer Ekpansion ploče pre nego što nastavite.
19. Pričvrstite Raspberri Pi na PiRacer ploču za proširenje
GPIO igle treba da budu na zadnjem delu automobila.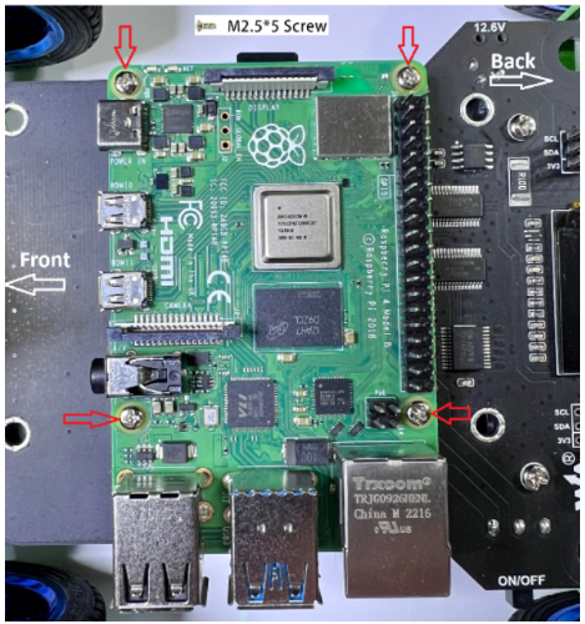
21. Pričvrstite trakasti kabl kamere na ulaz Raspberri Pi kamere
Plava strana prema USB portovima Pi je.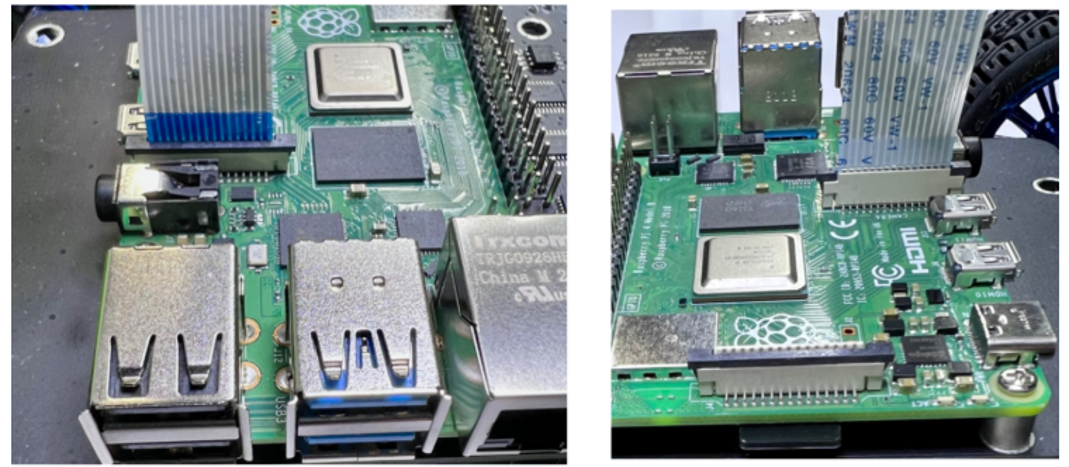
** UPOZORENjE ** Uverite se da Raspberri Pi se ne napaja prilikom povezivanja 6 pin žice
Takođe, ne napajajte Raspberri Pi preko USB-C (eksterno napajanje) dok ga napaja PiRacer Ekpansion ploča.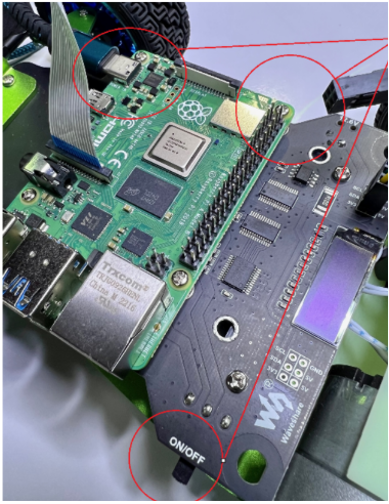
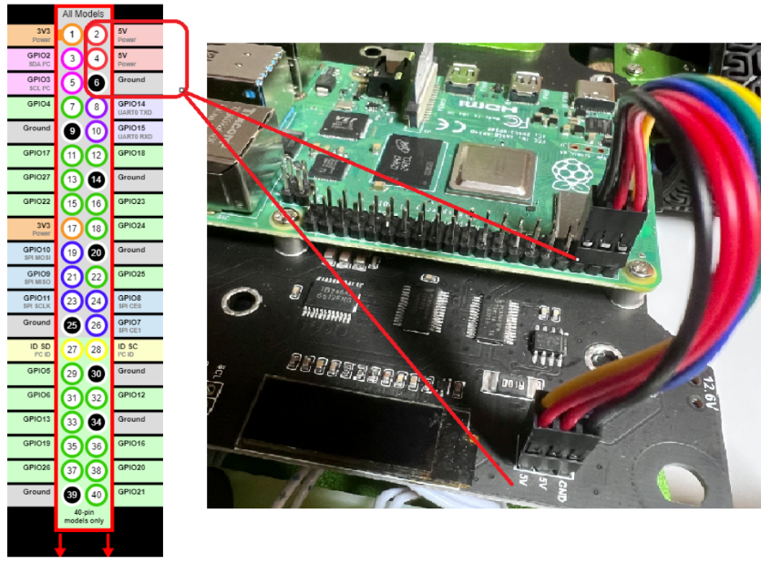
22. Povežite Raspberri Pi na PiRacer Ekpansion ploču pomoću 6PIN žica
Uporedite crveno|crveno|crno (5V|5V|uzemljenje) na Pi GPIO i crno|crveno|crveno (gnd|5V|5V) na PiRacer Expansion board.
1.2 Raspian Legaci (Buster) desktop
Flash OS - Raspian Legaci (Buster) desktop
Idite na zvanično spremište za preuzimanje za Buster OS. Sve ranije verzije Raspberri Pi OS-a mogu se naći i preuzeti ovde, a direktno prethodni Raspberri Pi 'Buster' OS zvanični link za preuzimanje je ovde. Pogledajte dole kako to izgleda, preuzmite slikovnu datoteku klikom na istaknutu datoteku. 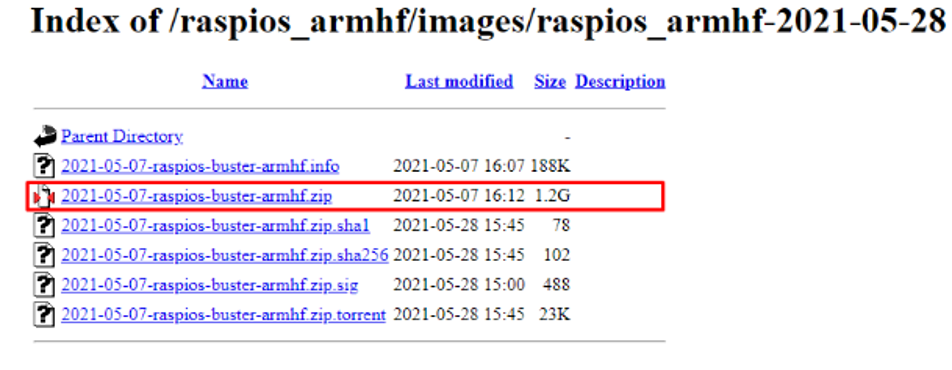
Preuzmite i instalirajte Raspberri Pi Imager sa https://www.raspberrypi.com/software/
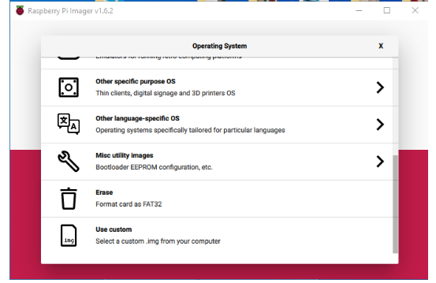
Sada, hajde da otvorimo zvanični Raspberri Pi Imager, pogledajte ga na slici ispod. Vredi napomenuti ovde - ako pritisnete | CTRL+SHIFT+X | na tastaturi dok je u programu Raspberri Pi Imager otvoriće napredni skriveni meni. Ovaj skriveni meni vam omogućava da unapred konfigurišete Raspberri Pi sa SSH, VIFI akreditivima i podešavanjima lokalizacije.
Nakon što je to uradio, otvoriće se eksplorer datoteka. Idite na taj izdvojeni Disc Image File i kliknite na njega. Pogledajte ovo na slici ispod. Zatim otvorite sliku datoteke i to će naoružati Raspberri Pi Imager sa Raspberri Pi 'Buster' OS-om. Pronađi ga, izaberite ga i otvorite.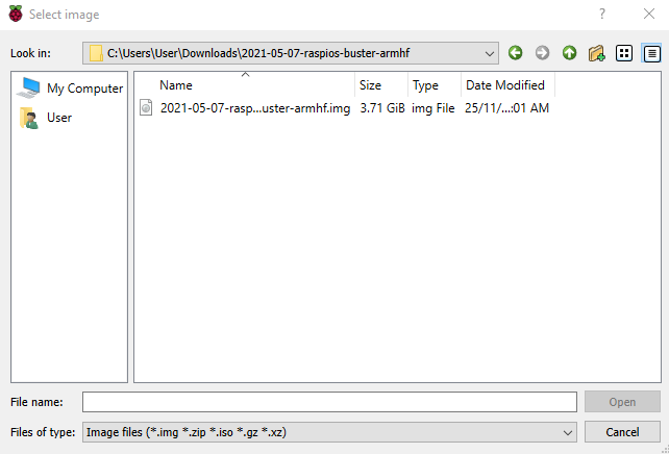
Ubacite Micro-SD karticu koju želite da se treperi u računar. Koristite USB na Micro-SD adapter ako je potrebno. Zatim kliknite na | IZABERITE SKLADIŠTENJE | dugme i izaberite umetnuti Micro-SD. Imajte na umu da će svi podaci koji su bili na vašoj Micro-SD kartici biti obrisani / trajno izbrisani kada se treperi. Zvanični Raspberri Pi Imager će sada izgledati kao na slici ispod.
Sa svime poredanim (desni OS je napunjen i ispravan Storage izabran) sada možete kliknuti na | PIŠI | dugme za početak treperi proces. Pogledajte ovaj treperi proces na slici ispod.
Kada se blic završi, automatski će praktično izbaciti Micro-SD karticu sa računara. Dakle, onda možete jednostavno fizički izvaditi svoj Micro-SD i ubaciti ga u Raspberri Pi računar sa jednom pločom. Zatim podesite Raspberri Pi normalno kao desktop računar. Kada se pokrene, dočekaće vas stara poznata pozadina, pogledajte sliku ispod, i uspešno ćete bljesnuti 'Buster' OS na vaš Raspberri Pi. Sada ste slobodni da lutate svojim dobro poznatim digitalnim terenom.
Pratite Pi Vizard instrukciju da podesite lokaciju, tastatura, ViFi, i dobiti ažuriranje
Meni / Podešavanja / Raspberri Pi Konfiguracija / Interfejsi
· omogućiti kameru i IKSNUMKSC
· opciono: omogućite VNC za daljinski pristup
· Kliknite na dugme OK i ponovo pokrenite
Dodatni softver
Java 3.8.3 (radi jedan po jedan)
sudo apt install build-essential libncurses5-dev libgdbm-dev libnss3-dev libssl-dev libreadline-dev libffi-dev -y
wget https://www.piton.org/ftp/python/3.8.3/Python-3.8.3.tgz
tar -zxvf Python-3.8.3.tgz
Srpski, English, Français...
sudo ./configure --enable-optimizations
sudo make -j 4
sudo napravi altinstall
sudo pithonksnumks -m pip install botoKSNUMKS
sudo python3.8 -m pip install tqdm
Dodatni alati
sudo apt instalirati chromium-brovser -y
sudo apt-get install zip unzip -y
AVS CLI
Podrazumevani korisnički accou nt na Raspberri Pi
sudo apt instalirati awscli -y
sudo pipKSNUMKS install --upgrade awscli
sudo pipKSNUMKS instalirajte botoKSNUMKS
korisnik - pi
PV - Malina
1.3 VaveShare Filijala za DonkeiCar Softvare
Instalirajte zavisnosti
sudo apt-get install build-essential pithonKSNUMKS pithonKSNUMKS-dev pithonKSNUMKS-pip
python3-virtualenv python3-numpy python3-picamera python3-pandas
python3-rpi.GPIO i2C-tools avahi-utils džojstik libopenjp2-7-dev
libtiff5-dev gfortran libatlas-base-dev libopenblas-dev
libhdf5-serial-dev git ntp -y
Opciono?
sudo apt-get install libilmbase-dev libopenexr-dev libgstreamer1.0-dev
libjasper-dev libwebp-dev libatlas-base-dev libavcodec-dev libavformat-dev
libswscale-dev libqtgui4 libqt4-test -y
Podešavanje virtuelnog okruženja
python3 -m virtualenv -p python3 env --system-site-packages
echo "izvor ~/env/bin/activate" >> ~/.Bašrk
izvor ~/.Bašrk
Instalirajte DonkeiCar Pithon kod - VaveShare Filijala za DonkeiCar Softvare 3.1.0
mkdir projekti
CD projekti
git klon https://github.com/waveshare/donkeicar
цd magaraц
Git Checkout Master
pip install -e .[pi]
PIP instalira tensorflov == 1.13.1
Nije potrebno pip install numpi --upgrade
pip install protobuf == 3.20.*
Test tenzorflov verzija - treba da pokaže 1.13.1
piton -c "uvoz tenzorflova; štampa(tensorflow.__version__)"
NAPOMENA: Nije mogao pokrenuti model na automobilu dok ne pokrenete sledeća dva
PIP instalirajte https://github.com/lhelontra/tensorflov-on-arm/releases/download/v2.2.0/
tensorflow-2.2.0-cp37-none-linux_armv7l. OMILjENO
PIP instalira tensorflov == 1.13.1
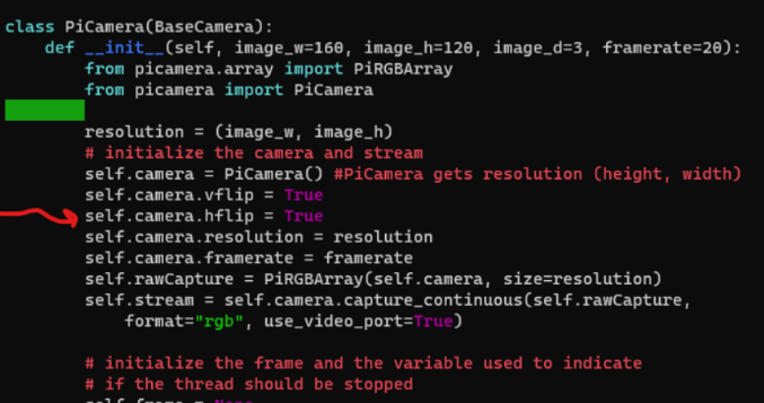
Izmeni camera.py da dodate self.camera.hflip = Istina
sudo nano /home/pi/projects/donkeicar/donkeicar/parts/camera.OMILjENO
Opciono Instalirajte OpenCV
sudo apt install python3-opencv -y
Testirajte sa:
Pithon -C "Uvoz CV2"
1.4 Prvi koraci sa DonkeiCar
Otvorite prozor terminala unesite sledeću komandu
Kreirajte aplikaciju DonkeiCar
Ovo će stvoriti fasciklu pod nazivom mycar sa svim pithon kodom potrebnim za vožnju automobila.
Kalibrirajte prednji upravljač
Uverite se da je vaš automobil sa zemlje kako biste sprečili odbeglu situaciju.
Koristite malu kutiju kao što je na Raspberri Pi ušao.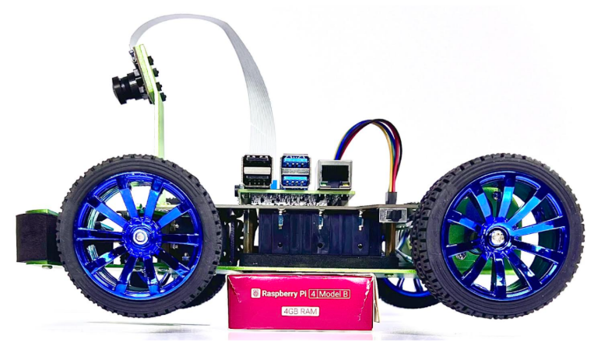
Da biste bili sigurni da DonkeiCar može voziti ravno i napraviti potrebne skretanja na stazi, hardver i softver automobila moraju biti kalibrirani.
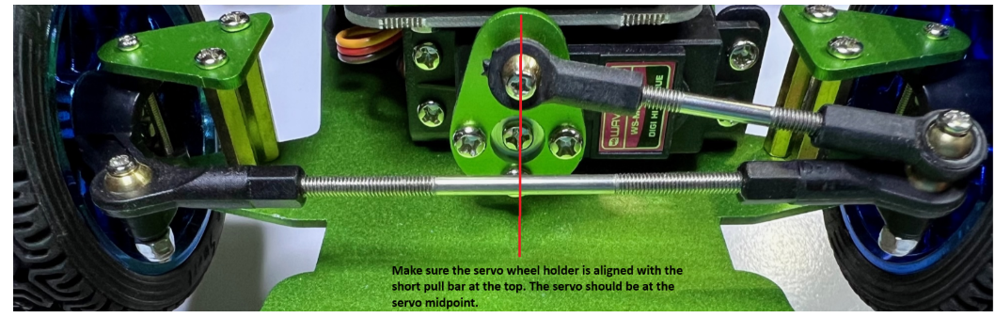
Prednji točkovi treba da budu ravno napred. Po potrebi podesite dugu traku za povlačenje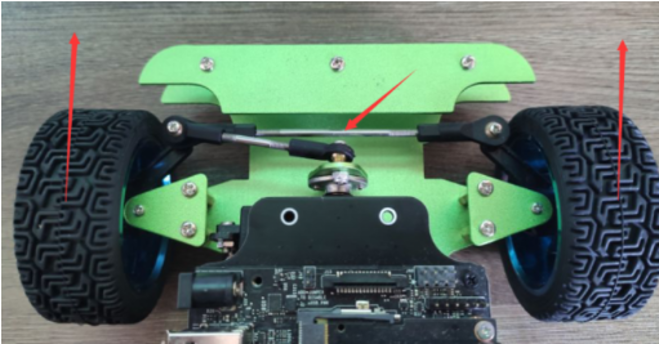
Držač servo točkova treba da bude usklađen sa kratkom trakom na vrhu. Po potrebi podesite kratku vučnu šipku.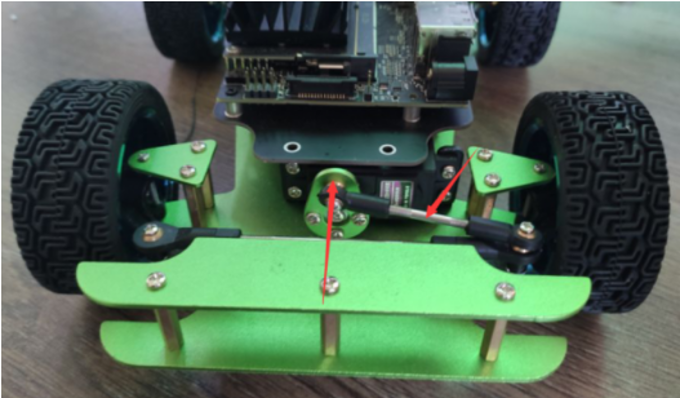
Kalibrirajte servo softver
Pronađite levo, centralno i desno upravljanje PVM za servo ovog automobila.
Centar treba da bude na pola puta između leve i desne strane. Primer:
Otišao 200
desno 560
centar će biti 380
U prozoru terminala unesite sledeće
cd ~/mycar
magarac kalibrira --kanal 0 --bus = 1
Probajte vrednosti 300, 400, 500 i vidite kako se upravljač menja. Shvatite maksimalni red za levo i desno.
Kada imate brojeve, uredite config.py i ažurirajte vrednosti koje ste pronašli.
Gas treba podesiti pomoću vaših brojeva za upravljanje. Gas je već ispravno podešen.
Nano config.py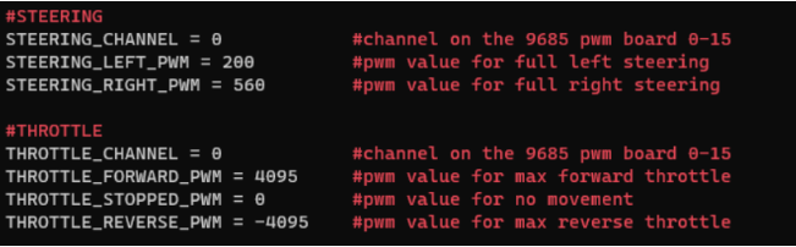
Instalirajte uslugu OLED displeja
cd ~
git klon https://github.com / vaveshare / pi-displej
ЦD Pi-displej
sudo ./install.OMILjENO
cd ~
Last modified: Friday, 19 June 2026, 6:55 AM