1.1 Manual de Montagem do PiRacer
Diagrama de parafusos/separadores
Diagrama para referência. Note que os parafusos que vêm com a roda servo não estão listados aqui.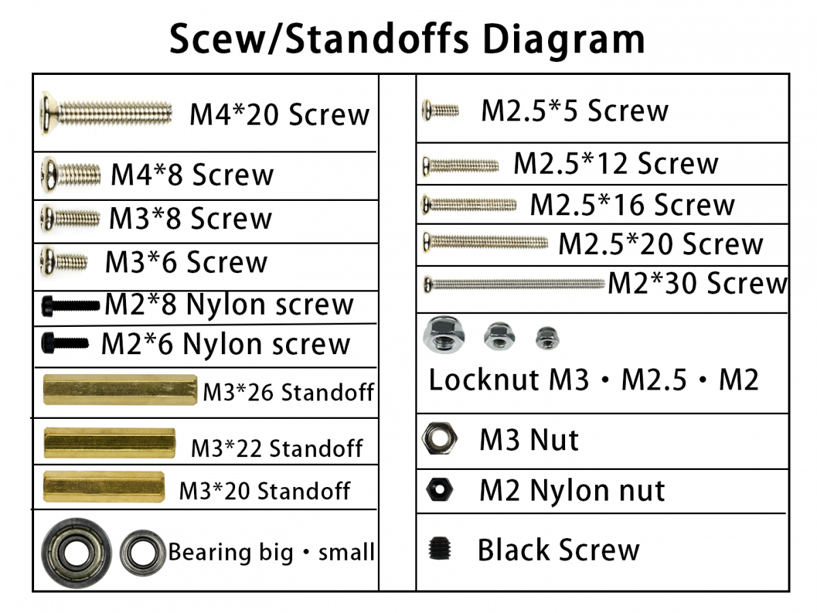
1. Fixar os motores a um chassis metálico
Nota: Não use o M3*8. É mais comprido e pode danificar o motor.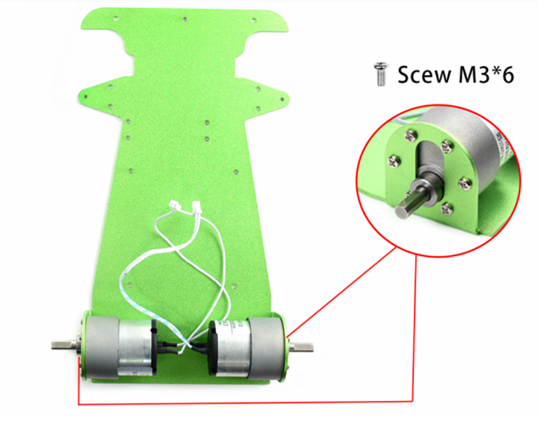
2. Adicionar engates às rodas
Primeiro, insira o parafuso preto no acoplador. Depois adiciona o engate à roda. Pode ser necessário pressionar o engate contra a roda. Fixa o acoplador à roda usando um parafuso M4*8.

3. Montar as rodas
Aperta o parafuso preto para fixar o acoplador ao lado plano do eixo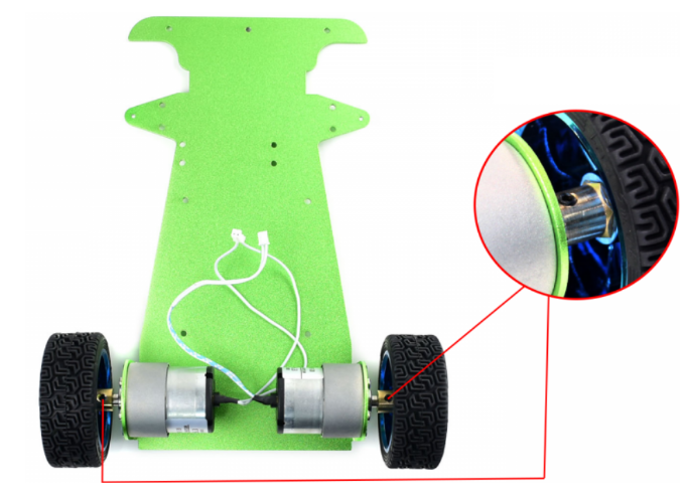
4. Montar o suporte do servo num chassis metálico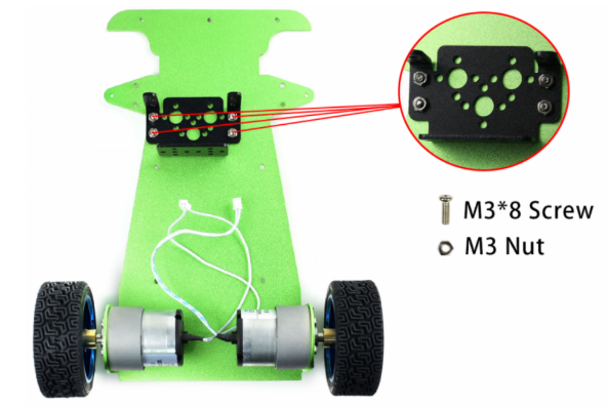
5. Fixar o servo no suporte e usar os parafusos e porcas
Certifica-te de que o servo está bem colocado. O eixo exterior deve estar no centro.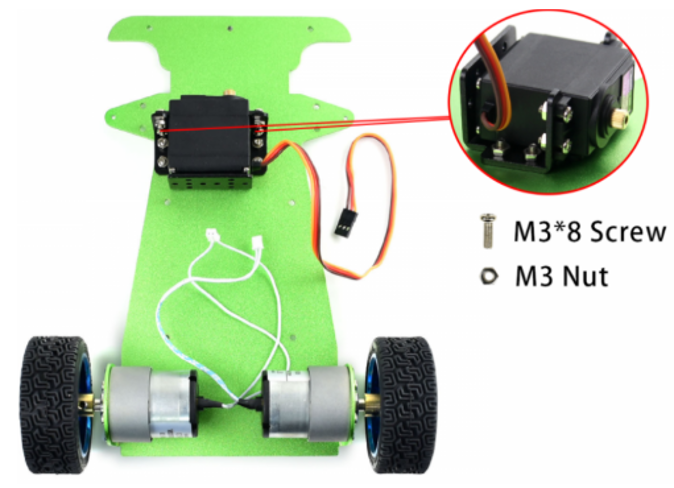
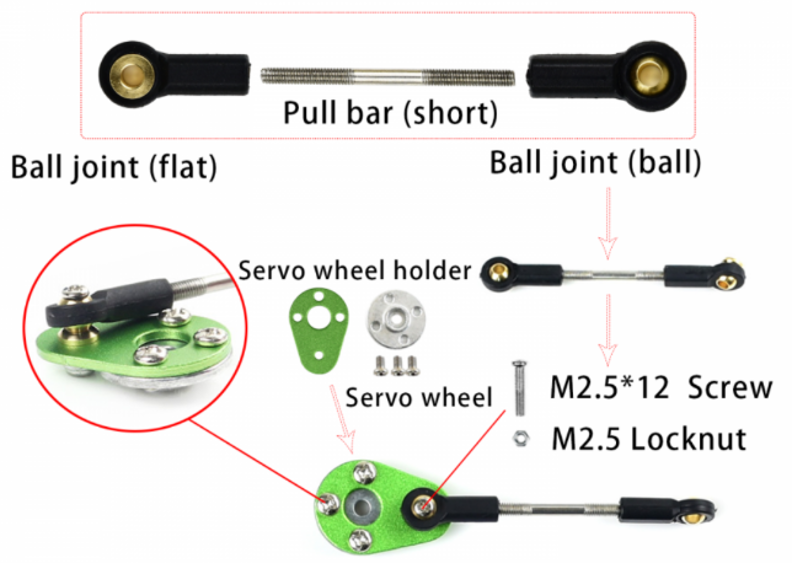
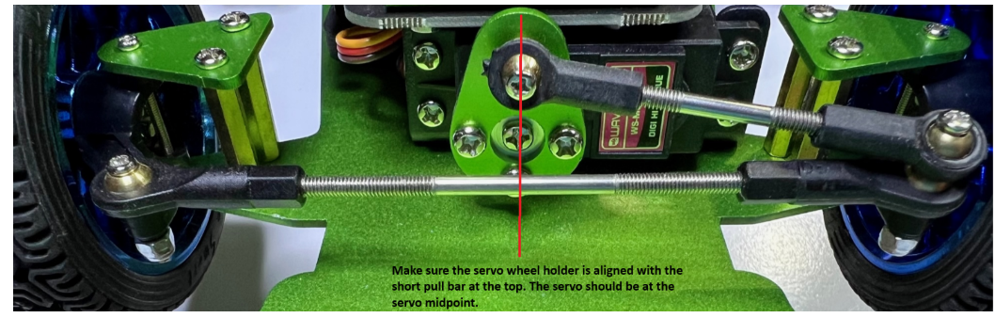
6. Montar a barra de puxar servo
A barra de tração é combinada usando duas juntas esféricas, uma plana e outra esférica, e a barra curta. As duas articulações esféricas devem ser perpendiculares uma à outra. Fixe a roda servo (buzina) ao suporte da roda servo usando os parafusos que vieram com a roda servo. Depois fixa a junta esférica plana ao suporte da roda servo. Note que o sulco da roda servo está voltado para o exterior.
7. Montar a barra de tração da roda dianteira e os nós dos dedos da direção
A barra de tração da roda dianteira é combinada usando duas juntas esféricas e a barra longa. Depois coloca os rolamentos nos nós dos dedos da direção. Cada articulação precisa de um apoio pequeno e outro grande.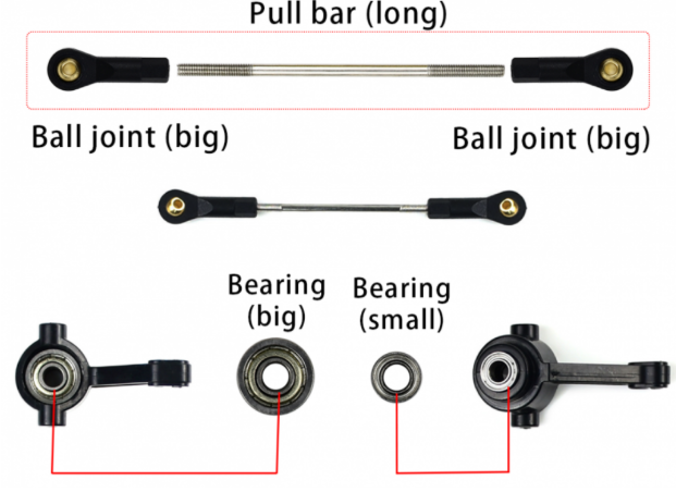
8. Montar o servo pull bard, o pull bard da roda dianteira e os nós dos dedos de direção
Prenda a barra de puxador servo no topo, depois a barra de puxar da roda dianteira e, finalmente, os nós dos dedos. O rolamento maior deve estar voltado para o interior.
9. Fixar as rodas no suporte de direção
A porca deve estar do lado exterior da roda, em frente à articulação. Certifica-te de que a roda não está nem demasiado apertada nem demasiado solta. Teste a roda para garantir que se move livremente.
10. Adicionar os entrelaçamentos M3 para as rodas dianteiras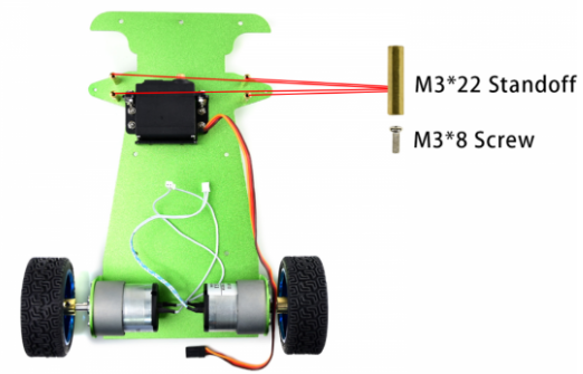
11. Montar a combinação das rodas dianteiras
Coloca a roda servo na servo, fixa-a com o parafuso M3. Fixa as rodas com parafusos M2, porca de bloqueio e a tábua triangular. As rodas dianteiras devem ser diretas. Ajusta a barra de tração longa se necessário.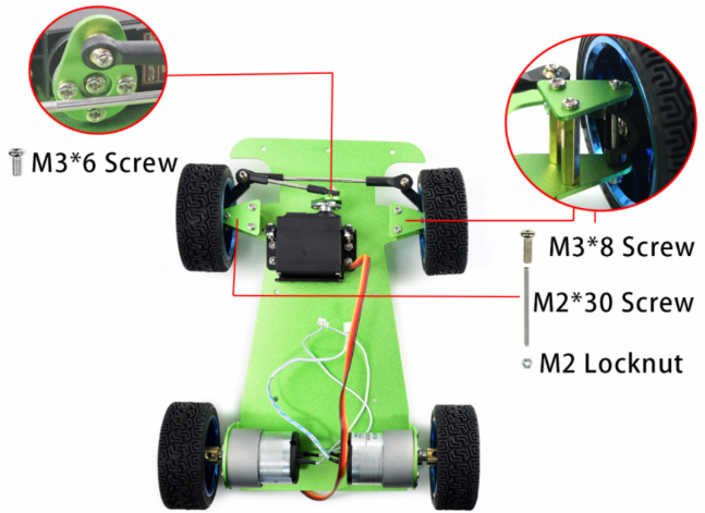
As rodas dianteiras devem ser diretas. Ajusta a barra de tração longa se necessário.
12. Adicionar os suportes para a placa de expansão do PiRacer e o para-choques
Insira as pastilhas de feltro EVA para o para-choques e a placa de expansão PiRacer.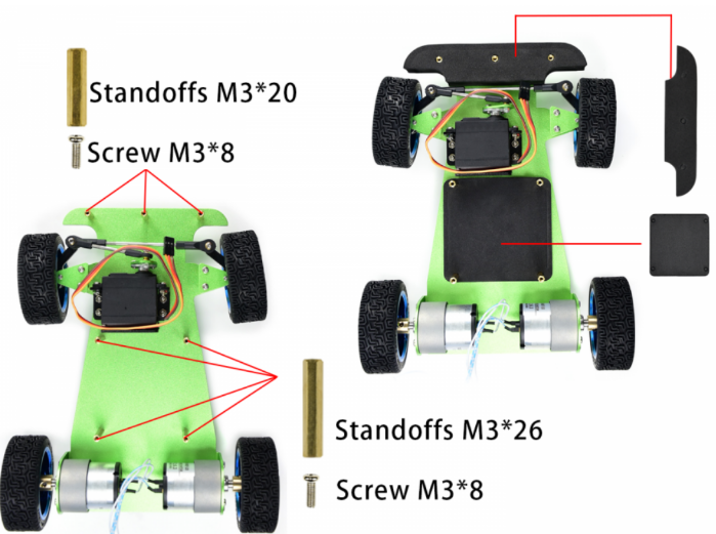
13. Fixar o suporte da câmara na placa de expansão do PiRacer.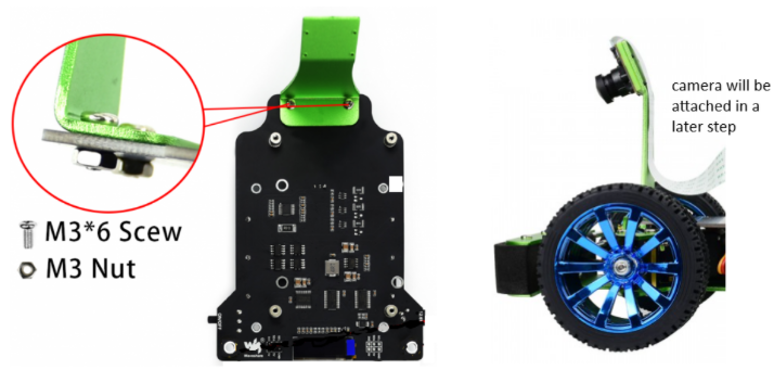
14. Inserir as pilhas na direção correta
Liga os fios dos motores e do servo à placa de expansão PiRacer.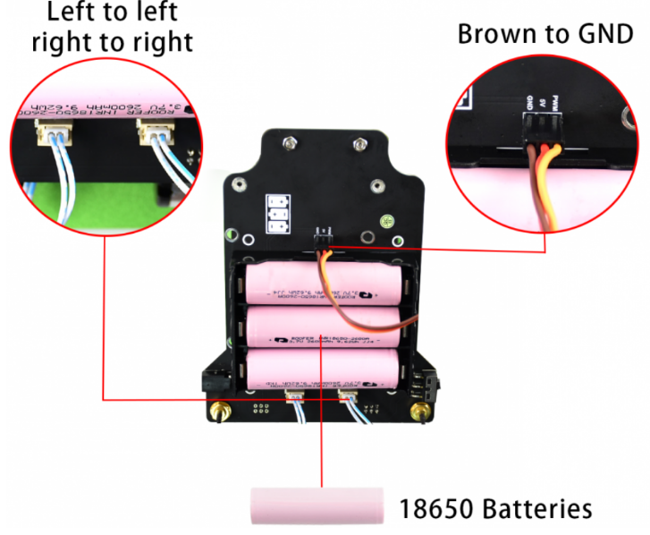
15. Fixa a placa de expansão e o para-choques metálico
Ajusta a posição dos fios do motor e servo e liga a placa de expansão PiRacer ao chassis metálico e fixa o para-choques metálico.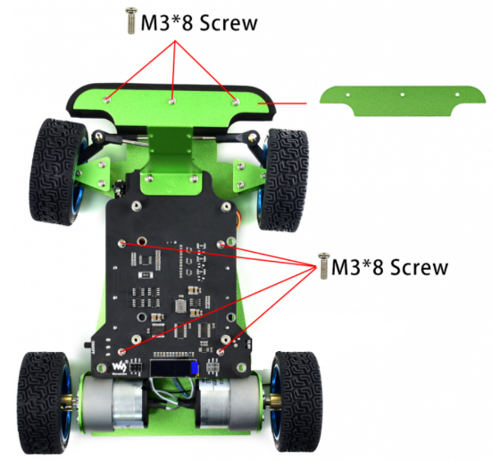
16. Montar a câmara no suporte usando parafusos de nylon
Nota: A placa acrílica deve estar entre a câmara e o suporte metálico para evitar curtos-circuitos.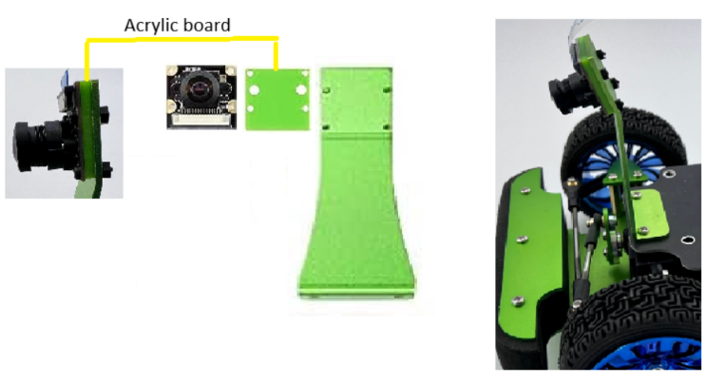
17. Acoplar a caixa do motor impressa em 3D nos motores DC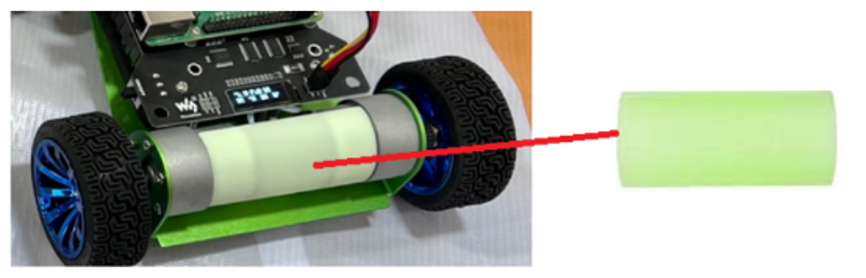
18. Desliga o Raspberry Pi e desliga o carregador da placa de expansão do PiRacer antes de prosseguir.
19. Ligar o Raspberry Pi à placa de expansão do PiRacer
Os pinos GPIO devem estar na traseira do carro.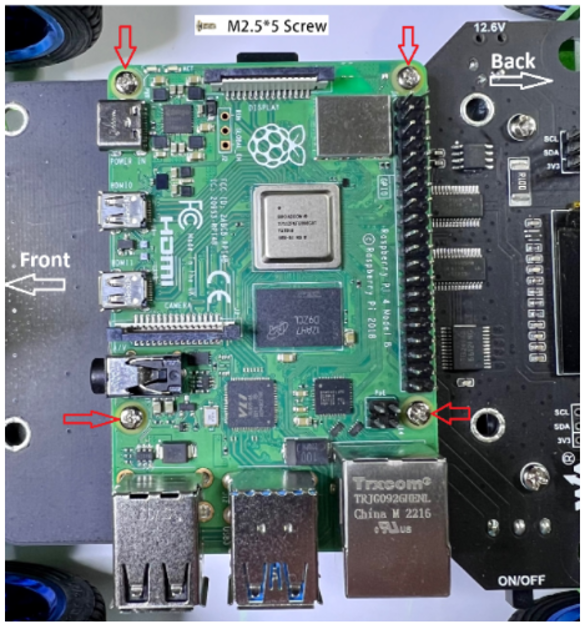
21. Ligue o cabo flat da câmara à entrada da câmara Raspberry Pi
Lado azul em direção às portas USB do Pi.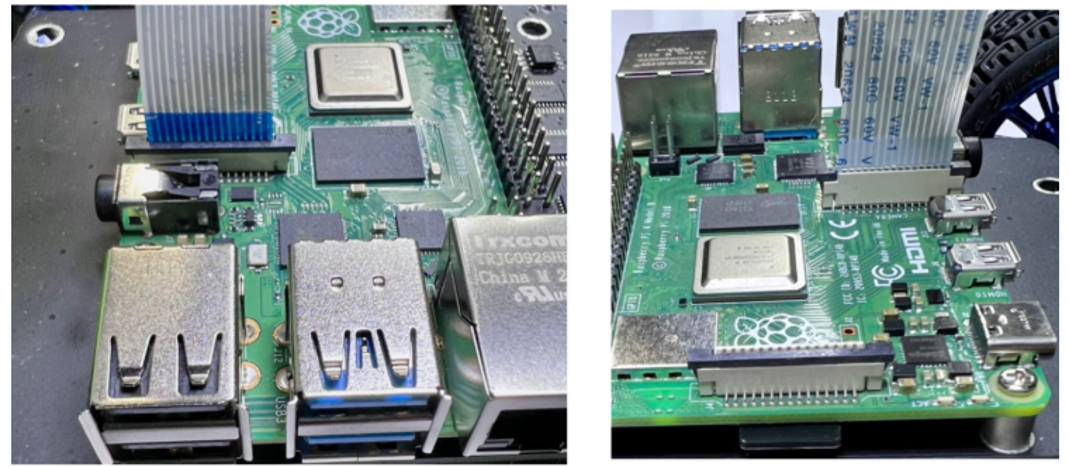
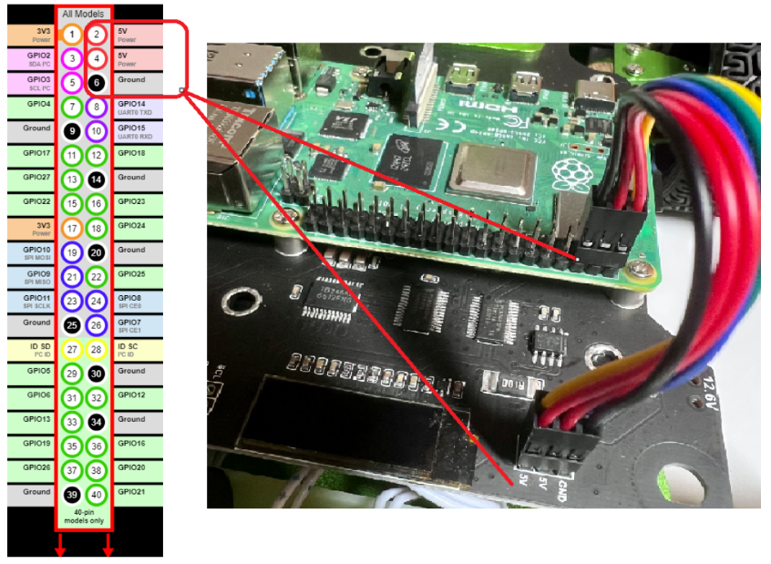
**AVISO** Certifique-se de que o Raspberry Pi não está alimentado ao ligar os fios de 6 pinos
Também não ligues o Raspberry Pi através do USB-C (alimentação externa) enquanto estiver alimentado pela placa de expansão PiRacer.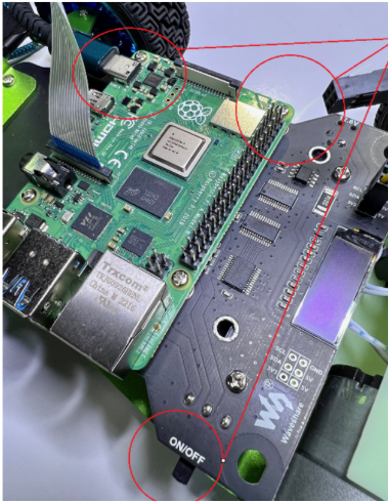
22. Ligue o Raspberry Pi à placa de expansão PiRacer usando os fios de 6 pinos
Compare o vermelho|vermelho|preto (5V|5V|terra) no Pi GPIO e o preto|vermelho|vermelho|vermelho (gnd|5V|5V) na placa de expansão do PiRacer.
1.2 Raspian Legacy (Buster) Desktop
Flash OS - Raspian Legacy (Buster) Desktop
Navegue até ao repositório oficial de downloads do Buster OS. Todas as versões anteriores do Raspberry Pi OS podem ser encontradas e descarregadas aqui , e o link oficial de download do Raspberry Pi 'Buster' OS diretamente anterior está aqui. Veja abaixo como isso se apresenta, descarregue o ficheiro de imagem clicando no ficheiro destacado. 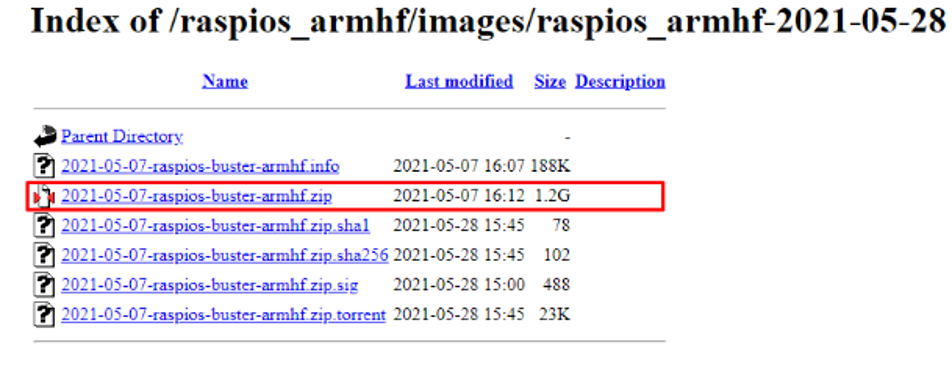
Descarregue e instale o Raspberry Pi Imager a partir de https://www.raspberrypi.com/software/
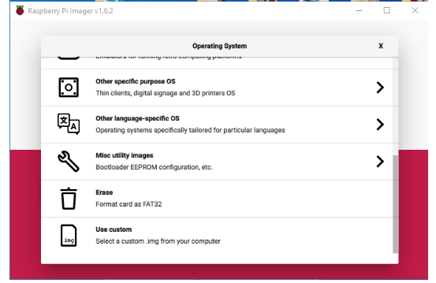
Agora, vamos abrir o Oficial Raspberry Pi Imager, veja-o na imagem abaixo. Vale a pena referir aqui - se acertares | CTRL+SHIFT+X | no seu teclado, enquanto estiver no Programa Raspberry Pi Imager, abrirá o Menu Oculto Avançado. Este Menu Oculto permite-lhe pré-configurar o seu Raspberry Pi com SSH, credenciais WIFI e definições de localização.
Depois disso, abre um explorador de ficheiros. Navega até ao Ficheiro de Imagem do Disco extraído e clica nele. Veja isto na imagem abaixo. Depois abre a imagem do ficheiro e isso vai armar o Raspberry Pi Imager com o sistema operativo 'Buster' do Raspberry Pi. Encontra-o, seleciona-o e abre-o.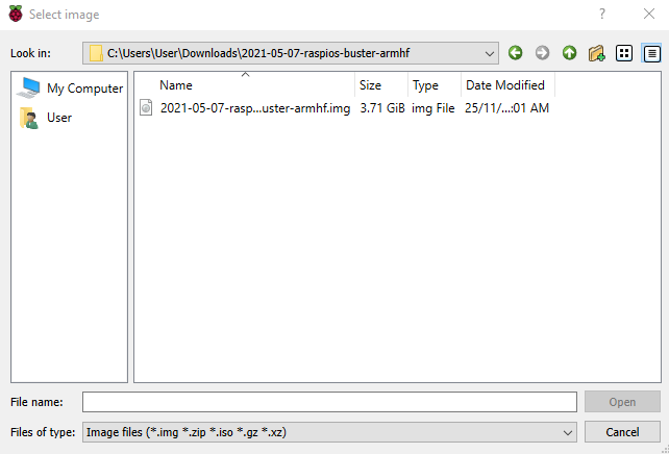
Insira o cartão Micro-SD que pretende instalar no seu computador. Use um adaptador USB para Micro-SD se necessário. Depois clica no | ESCOLHER ARMAZENAMENTO | e seleciona a Micro-SD inserida. Tenha em mente que qualquer dado que estivesse no seu cartão Micro-SD será apagado ou apagado permanentemente quando for gravado. O Official Raspberry Pi Imager vai agora parecer a imagem abaixo.
Com tudo resolvido (o sistema operativo correto carregado e o Armazenamento correto selecionado), pode agora clicar no | WRITE | botão para iniciar o processo de flash. Veja este processo de flashing na imagem abaixo.
Quando a flash estiver concluída, ejetará virtualmente o cartão Micro-SD do computador. Assim, podes simplesmente tirar fisicamente a tua Micro-SD e inseri-la num computador Raspberry Pi de placa única. Depois configura o teu Raspberry Pi normalmente como um computador de secretária. Assim que arrancar, será recebido pelo antigo fundo familiar, veja a imagem abaixo, e terá conseguido flashar o sistema operativo 'Buster' para o seu Raspberry Pi. Agora está livre para explorar o seu terreno digital bem conhecido.
Siga as instruções do Assistente Pi para definir a localização, teclado, wifi e obter atualizações
Menu / Preferências / Configuração do Raspberry Pi / Interfaces
· Ativar Câmara e I2C
· opcional: ativar VNC para acesso remoto
· Clica em OK e reinicia
Software Adicional
Java 3.8.3 (executar um de cada vez)
sudo apt install build-essential libncurses5-dev libgdbm-dev libnss3-dev libssl-dev libreadline-dev libffi-dev -y
WGET https://www.Python.org/ftp/python/3.8.3/Python-3.8.3.tgz
tar -zxvf Python-3.8.3.tgz
cd Python-3.8.3
sudo ./configure --enable-optimizations
sudo make -j 4
Sudo Make AltInstall
Sudo Python3.8 -M PIP Install BOTO3
Sudo Python3.8 -M Instalação de PIP tqdm
Ferramentas adicionais
sudo apt install chromium-browser -y
sudo apt-get install zip descompactar -y
AWS CLI
Accou utilizador padrão no Raspberry Pi
sudo apt install awscli -y
Instalação do Sudo Pip3 -- Atualizar AWSCLI
Sudo Pip3 Install Boto3
Utilizador - Pi
pw - framboesa
1.3 Ramo WaveShare para o Software DonkeyCar
Dependências de Instalação
sudo apt-get install build-essential python3 python3-dev python3-pip
python3-virtualenv python3-numpy python3-picamera python3-pandas
python3-rpi.GPIO i2c-tools avahi-utils joystick libopenjp2-7-dev
libtiff5-dev gfortran libatlas-base-dev libopenblas-dev
libhdf5-serial-dev git ntp -y
Opcional?
Sudo apt-get install libilmbase-dev libopenexr-dev libgstreamer1.0-dev
libjasper-dev libwebp-dev libatlas-base-dev libavcodec-dev libavformat-dev
libswscale-dev libqtgui4 libqt4-test -y
Configurar o Ambiente Virtual
python3 -m virtualenv -p python3 env --system-site-packages
Echo "fonte ~/env/bin/ativar" >> ~/.bashrc
fonte ~/.bashrc
Instalar Código Python DonkeyCar - Ramo WaveShare para DonkeyCar Software 3.1.0
Projetos MKDIR
Projetos de CD
Git clone https://github.com/waveshare/donkeycar
CD Donkeycar
Mestre do Git Checkout
pip install -e .[pi]
pip install tensorflow==1.13.1
Não é necessário instalar pip numpy --upgrade
PIP install protobuf==3.20.*
Versão do tensorflow de teste - deve mostrar 1.13.1
python -c "importar tensorflow; impressão(tensorflow.__version__)"
NOTA: Não podia correr modelo no carro até usar os dois seguintes
Instalação de pip https://github.com/lhelontra/tensorflow-on-arm/releases/download/v2.2.0/
tensorflow-2.2.0-cp37-none-linux_armv7l .whl
pip install tensorflow==1.13.1
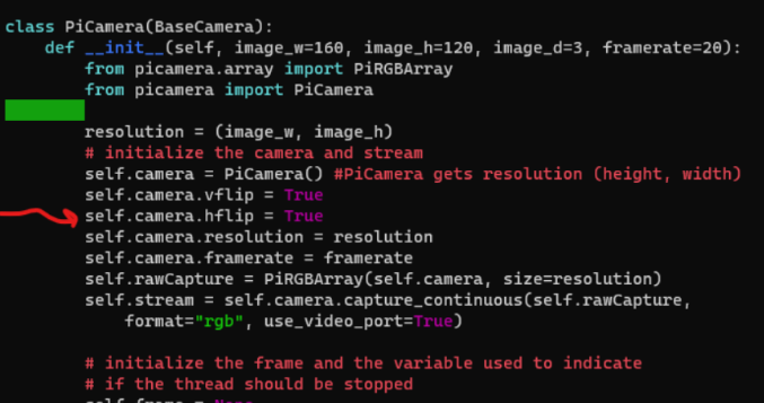
Edit camera.py para adicionar self.camera.hflip = Verdadeiro
Sudo Nano /Home/Pi/Projects/Donkeycar/Donkeycar/Peças/Câmara.py
Instalação Opcional do OpenCV
sudo apt install python3-opencv -y
Teste com:
Python -C "Import CV2"
1.4 Começar com DonkeyCar
Abra uma janela de terminal, insira o seguinte comando
Criar a App DonkeyCar
Isto vai criar uma pasta chamada mycar com todo o código python necessário para conduzir o carro.
Calibrar a direção dianteira
Certifique-se de que o seu carro está fora do chão para evitar situações de descontrolo.
Usa uma caixa pequena como a do Raspberry Pi que veio.
Para garantir que o DonkeyCar consegue conduzir em linha reta e fazer as curvas necessárias na pista, é necessário calibrar o hardware e o software do carro.
As rodas dianteiras devem ser diretas. Ajusta a barra de tração longa se necessário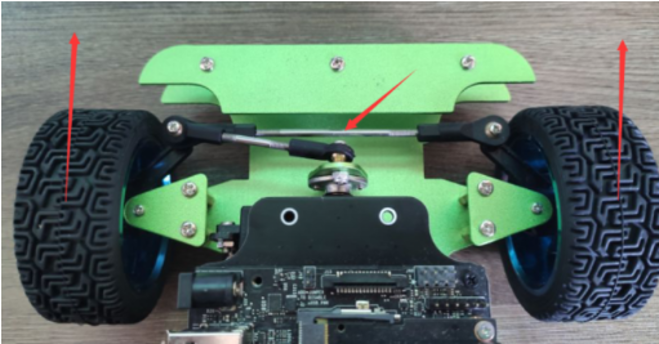
O suporte da roda servo deve estar alinhado com a barra de tração curta no topo. Ajusta a barra de tração curta se necessário.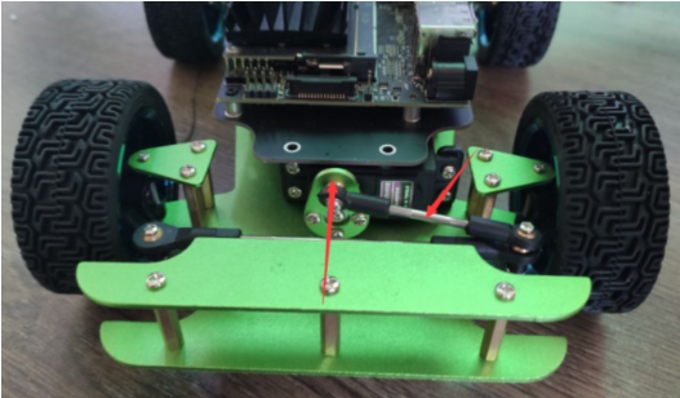
Calibrar o software do servo
Encontre o PWM de direção para a esquerda, central e direita para o servo deste carro.
O centro deve estar a meio caminho entre a esquerda e a direita. Exemplo:
Esquerda 200
Direita 560
O centro será 380
Numa janela terminal, introduza o seguinte
cd ~/mycar
calibração burro --canal 0 --bus=1
Experimenta valores 300, 400, 500 e vê como a direção muda. Calcula o turno máximo para esquerda e direita.
Depois de tiveres os números, edita o config.py e atualiza os valores que encontraste.
O acelerador deve ser ajustado usando os seus números para a direção. O acelerador já está corretamente ajustado.
Nano config.py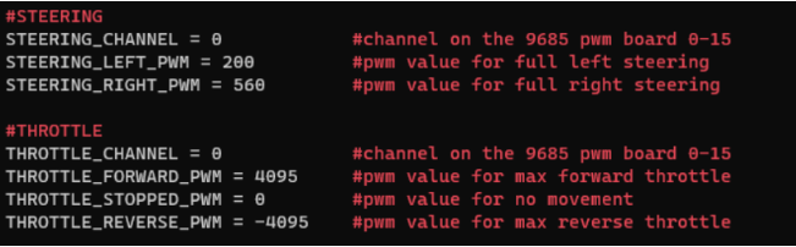
Instalar o Serviço de Ecrã OLED
CD ~
Git clone https://github.com/waveshare/pi-display
Ecrã CD Pi
sudo ./install.sh
CD ~
Last modified: Thursday, 18 June 2026, 4:55 AM