O software utilizado pelo Dobot Magician é o DobotStudio, e pode descarregar a versão mais recente no nosso site oficial: http://www.dobot.cc/downloadcenter.html?sub_cat=70#sub-download Depois de o ficheiro ser descarregado com sucesso, descompacte e faça duplo clique DobotStudio.exe.

Selecione a porta serial Dobot correspondente, no canto superior esquerdo do DobotStudio e clique em "Conectar". Após uma ligação bem-sucedida, será mostrado o "Desconectar". Quando o Dobot estiver ligado, os parâmetros de coordenadas serão atualizados no lado direito da interface
Existem oito módulos na interface principal do software:
· Ensino e Reprodução: Um sistema para ensinar o Dobot a mover-se. Permite ao Dobot realizar movimentos gravados por controlo manual.
· Escrita e Desenho: Controla o Dobot para escrever, desenhar ou gravar a laser.
· DobotBlockly: Ensina programação básica através de uma interface de puzzle. Intuitiva e fácil de entender.
· Script: Editar a linguagem de script para controlar o Dobot.
· LeapMotion: Controla o Dobot por gesto.
· Rato: Controla o Dobot com o rato.
· LaserEngraving: Grava imagens, formas e palavras através de bitmap com o Dobot.
· Adicione Mais: Adicione ainda mais funções para o Dobot!
10.1 Modo linear
Com base no sistema de coordenadas dos eixos do corpo X, Y, Z, com a origem no centro de três motores. X, Y, Z é a coordenada do centro da plataforma final, e a direção de X é perpendicular à base para a frente, Y é perpendicular à base para a esquerda, e Z é vertical para cima. R indica a rotação da junta servo em relação ao referencial coordenado (no sentido anti-horário é a direção positiva).
(1) Clicar em X+, X- e o Dobot irá mover-se ao longo de X na direção negativa ou positiva;
(2) Clicar em Y+, Y- e o Dobot irá mover-se ao longo de Y na direção negativa ou positiva;
(3) Clicar em Z+, Z- e Dobot irá mover-se ao longo de Z na direção negativa ou positiva;
(4) Clicar em R+, R- e Dobot irá mover-se ao longo de R na direção negativa ou positiva.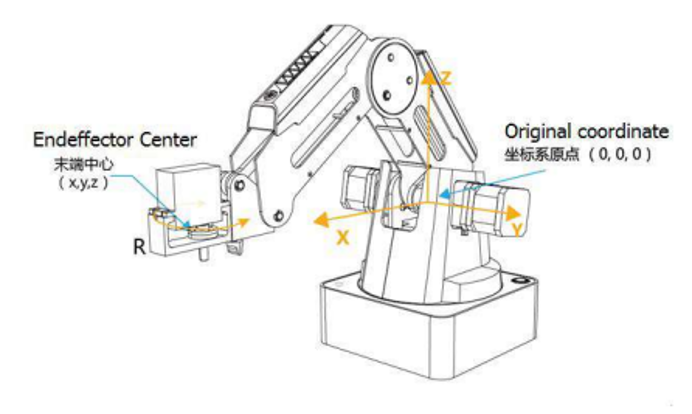
10.2 Modo de corrida
Este movimento é direcionado para um único eixo. Mantenha o botão pressionado e o eixo correspondente move-se de forma independente. Quando o eixo está no máximo, a articulação deixa de se mover. Cada eixo tem o sentido contrário ao dos ponteiros do relógio como direção positiva. Articulação 1、2、3、4 referem-se respetivamente à base, braço traseiro, antebraço e servo.
(1) Clique na Junta1+、Articulação1- e controlar o motor base Dobot para rodar na direção negativa ou positiva;
(2) Clique na Articulação2+、Articulação2- e controla o motor do braço traseiro para rodar na direção negativa ou positiva;
(3) Clicar na Articulação3+、Articulação3- e controlar o motor do antebraço para rodar na direção negativa ou positiva;
(4) Clique na Junta4+、Articulação4- e controle do servo para rodar na direção negativa ou positiva; Entre estes, o alcance de rotação do Joint4 é de ±150°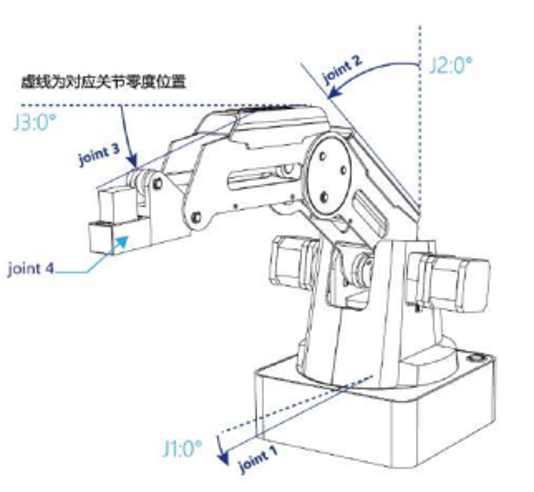
Last modified: Thursday, 18 June 2026, 4:58 AM