Ligue o seu carro com o modelo
cd ~/mycar
Python gerir.PY Drive --modelo ~/mycar/models/mypilot.H5
Para condução autónoma ou direção, use o joystick do navegador web noutro dispositivo.
Vai precisar de usar um tablet ou telemóvel ligado ao mesmo wifi. Depois de ligar o carro, use um tablet ou telemóvel para se ligar ao servidor web do carro usando o IP:8887 do carro. O carro deverá mostrar a sua IP se o Serviço de Visualização OLED estivesse ativado numa etapa anterior.
Condução Autónoma
NOTA: Assim que o Local Pilot for selecionado, o carro começará a conduzir de forma autónoma
· Modo de Controlo: Selecionar **Joystick** (a área de controlo do joystick está marcada como click/touch para usar joystic)
· Acelerador Máximo: Define o acelerador máximo para cerca de 50% para evitar que o carro vá demasiado rápido
· Modo & Piloto: Selecionar Piloto Local (Piloto Local é autónomo)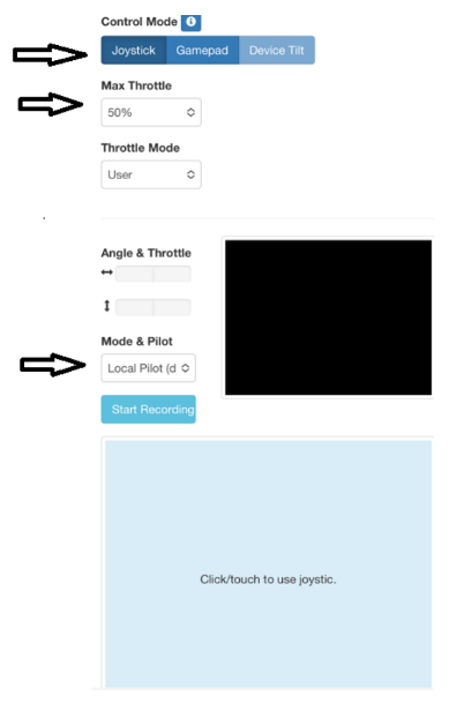
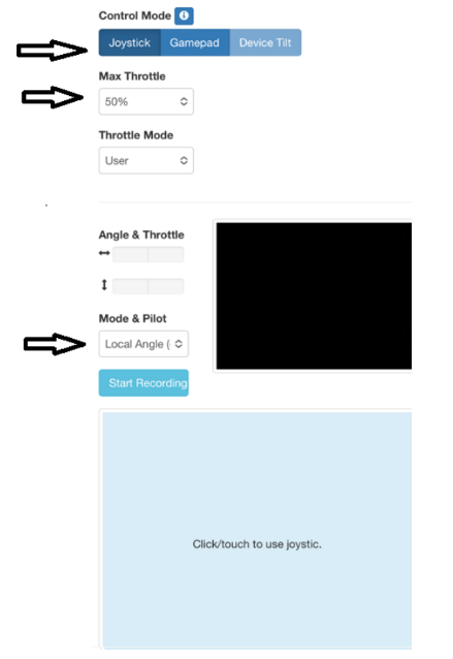
Direção Autónoma
· Modo de Controlo: Selecionar **Joystick** (a área de controlo do joystick está marcada como click/touch para usar joystic)
· Acelerador Máximo: Define o acelerador máximo para cerca de 50% para evitar que o carro vá demasiado rápido
· Modo & Piloto: Selecione o ângulo local (o ângulo local é a direção do carro enquanto você dá o acelerador)
Modelo autónomo mais rápido?
Use o seu modelo de condução autónoma funcional para recolher novos dados a uma velocidade mais rápida. Usa o Local Angle para o carro virar enquanto tu aceleras mais rápido.
Last modified: Thursday, 18 June 2026, 4:56 AM