Liga o carro
cd ~/mycar
Python gerir. Campanha de PY
Este script inicia o ciclo de condução no seu carro, que inclui uma parte que serve como servidor web para controlar o seu carro. Agora pode controlar o seu carro a partir de um navegador web na URL: <hostname.local>:8887 do seu carro.
Abra um navegador e ligue-se ao DonkeyCar Monitor em localhost:8887
NOTA: Quando o carro é ligado, cria-se uma pasta em /mycar/data chamada tub_#_date para armazenar os dados da sessão. Os dados são recolhidos quando o acelerador é acionado. Para reunir um conjunto de dados limpo, a melhor prática é parar o "disco de manage.py python" usando Contole + C e reiniciar para começar o treino com um novo /mycar/data/tub.
Existem 2 opções de disco
1. Usar o comando (recomendado)
Depois de ligar o carro, abra um navegador web a partir do ambiente de trabalho do Raspberry Pi enquanto o carro está ligado ao monitor.
Seleciona Gamepad e define o acelerador para 50% para começares a praticar. Testa as curvas e a velocidade enquanto o carro está na caixa Pi.
Quando estiver pronto para conduzir na pista, desligue o monitor, coloque o carro na pista e comece a conduzir. Começa devagar até te sentires confortável a manusear o carro.
2. Usar o joystick do navegador web
Vai precisar de usar um tablet ou telemóvel ligado ao mesmo wifi. Depois de ligar o carro, use um tablet ou telemóvel para se ligar ao servidor web do carro usando o IP:8887 do carro. O carro deverá mostrar a sua IP se o Serviço de Visualização OLED estivesse ativado numa etapa anterior.
Selecione Joystick (a área de controlo do joystick está marcada como click/touch para usar joystic) Use a área do joystick para conduzir o carro com o dedo.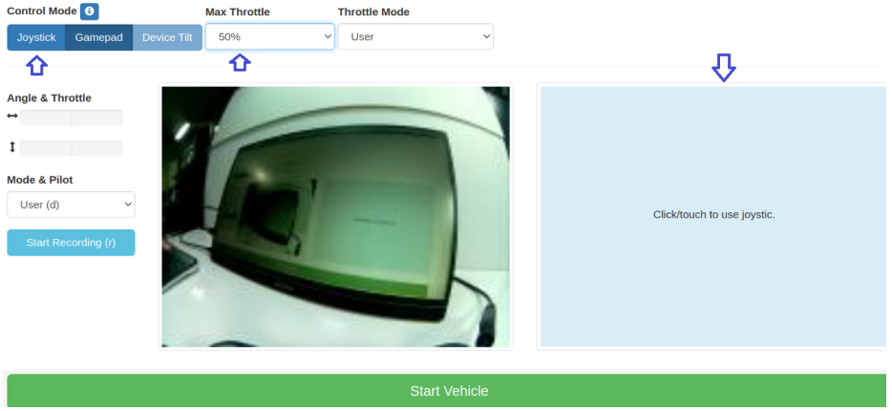
Quando terminar de conduzir, pare a "drive de manage.py python" usando Contole + C.
Last modified: Thursday, 18 June 2026, 4:55 AM