Dobot Blockly je programátorská platforma založená na Google Blockly. V tomto procese môžu používatelia programovať cez formát hádaniek, ktorý je jednoduchý a ľahko pochopiteľný. Používatelia môžu tiež kedykoľvek používať integrované API Dobotu.
12.1 Blokové rozhranie
Otvorte DobotStudio a kliknite na DobotBlock Lab: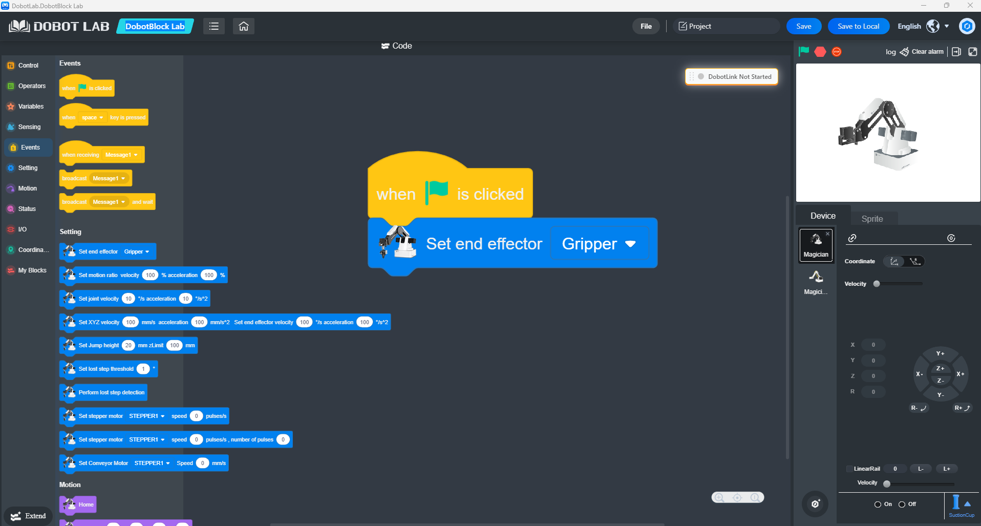
12.2 Blokový kód
12.3 Inicializácia a definícia problému
Kontext a motivácia
V modernom priemysle a ekológii je manuálne triedenie odpadu pomalý, neefektívny a často nebezpečný proces. Cieľom tohto projektu je vytvoriť autonómny systém, ktorý využíva počítačové videnie a robotickú manipuláciu na rozpoznávanie a fyzické oddelenie rôznych materiálov (v tomto prípade organický odpad a plast).
Vyhlásenie problému
Hlavnou výzvou je synchronizácia troch nezávislých podsystémov:
1. Dopravný systém: Dopravný pás, ktorý privádza predmety do pracovného priestoru.
2. Senzorický systém: Kamera, ktorá musí identifikovať typ predmetu v reálnom čase.
3. Aktuačný systém: Robotické rameno, ktoré musí presne vykonávať vyberanie a umiestňovanie na základe spätnej väzby zo senzora.
12.4 Architektúra riešení
Riešenie je založené na platforme Dobot Magician a blokovom programovacom prostredí (Blockly), ktoré integruje AI moduly na rozpoznávanie obrázkov.
Hardvérové komponenty
- Dobot Magician Arm: Vysoko presný 4-osový robot.
- Prísavka: Používa sa ako koncový efektor pre svoju všestrannosť pri manipulácii s rôznymi tvarmi.
- USB kamera: Namontovaná nad pásom pre stabilný pohľad zhora.
- Dopravníkový pás: Ovládaný krokovým motorom pripojeným k Dobotu.
Softvérová logika
Algoritmus nasleduje iteratívny uzavretý model: Spustiť pás -> Zastaviť -> Zachytiť -> Analyzovať -> Zoradiť -> Vrátiť sa domov.
12.5 Podrobná analýza kódových blokov
Program je rozdelený do štyroch kľúčových častí:
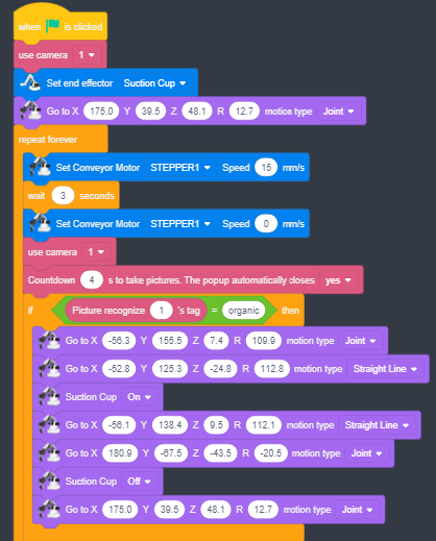
Konfigurácia (Setup)
- použiť kameru 1: Deklaruje hardvérový vstup pre vizuálne dáta.
- Nastav koncový efektor [Prísavka]: Soft-mapuje ovládanie vzduchového čerpadla na výstup robota.
- Prejdite na X:175, Y:39.5, Z:48.1: Toto je "Bezpečnostná pozícia." Robot ustupuje, aby neblokoval kameru a zabezpečil optimálnu cestu na akékoľvek miesto na páse.
Logistika (riadenie dopravníkov)
Vo vnútri bloku opakovania navždy:
- Nastavte dopravníkový motor [STEPPER1] Rýchlosť 15 mm/s: Aktivuje pás kontrolovanou rýchlosťou, aby zabránil kĺzaniu ľahkých predmetov.
- počkať 3 sekundy: Kritická časová konštanta definujúca vzdialenosť medzi položkami.
- Rýchlosť 0: Zastaví pás, aby robot mohol vykonať presný "statický pick".
AI inšpekcia (rozpoznávanie obrázkov)
- Odpočítavanie 4 s: Poskytuje stabilizačný čas pre zaostrenie kamery a pre AI vyskakovacie okno na spracovanie obrazu.
- Ak obrázok rozpozná tag 1 = [organický/plastic]: Volá Deep Learning API na porovnanie aktuálneho rámca s trénovaným datasetom a vráti class tag.
Kinematika a manipulácia
Pre každú vetvu (organickú/plastovú) systém používa dva typy pohybu:
1. Pohyb kĺbu (PTP): Pohybuje všetkými kĺbmi súčasne pre najrýchlejší prechod z bodu do bodu.
2. Priamka (lineárna): Pohybuje ramenom striktne vertikálne po osi Z, aby sa zabezpečil dokonalý kontakt prísavky bez prevrátenia predmetu.
12.6 Operačný algoritmus (krok za krokom)
· ŠTART: Inicializujte nástroje a nastavte koncový efektor.
· TRANSPORT: Pohybujte pásom na 3 sekundy, potom zastavte.
· SENSE: Zachytiť obrázok a identifikovať značku pomocou AI.
· ROZHODNUTIE:
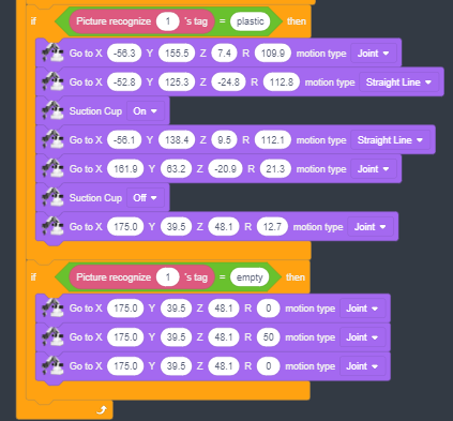
· Ak organické: Presuň sa, aby si získal súradnice, zapni sanie, presuň sa do organického zásobníka, vypni odsávanie.
· Ak je plast: Presuň sa, aby si získal súradnice, zapni sanie, presuň sa do plastového boxu, vypni odsávanie.
· Ak je prázdny: Vykonajte signálny pohyb "trasenia" (otáčanie osi R).
· RESET: Vráťte sa na počiatočné bezpečnostné súradnice.
· LOOP: Opakujte cyklus donekonečna.
12.7 Technické špecifikácie súradníc
Na základe skriptu boli kalibrované nasledujúce súradnice:
|
Bod |
X (mm) |
Y (mm) |
Z (mm) |
R (°) |
Popis |
|
Domov |
175.0 |
39.5 |
48.1 |
12.7 |
Poloha na voľnobeh/čakanie |
|
Prístup |
-56.3 |
155.5 |
7.4 |
109.9 |
Pozícia nad položkou |
|
Chyť |
-52.8 |
125.3 |
-24.8 |
112.8 |
Kontaktný bod (znížený) |
|
Organický zásobník |
180.9 |
-67.5 |
-43.5 |
-20.5 |
Likvidácia na organické materiály |
|
Plastový kontajner |
161.9 |
63.2 |
-20.9 |
21.3 |
Likvidácia plastov |
12.8 Riešenie problémov s implementáciou
· Nepresné chytanie: Uistite sa, že je predmet v strede. Ak sa to líši, použite vodiace prvky na páse alebo integrujte dynamickú spätnú väzbu X/Y z AI kamery.
· Chyby v klasifikácii: Rozpoznávanie AI je citlivé na svetlo. Použite vysoko kontrastnú farbu pásu a konzistentné vonkajšie LED osvetlenie.
· Bezpečnosť: Vždy sa uistite, že pracovný priestor je čistý od prekážok pred začatím nekonečného cyklu.
Last modified: Friday, 19 June 2026, 6:29 AM