Softvér používaný Dobot Magician je DobotStudio a najnovšiu verziu si môžete stiahnuť z našej oficiálnej webovej stránky: http://www.dobot.cc/downloadcenter.html?sub_cat=70#sub-download Po úspešnom stiahnutí súboru rozbalte a dvakrát kliknite DobotStudio.exe.

Vyberte zodpovedajúci sériový port Dobot v ľavom hornom rohu DobotStudio a kliknite na "Pripojiť". Po úspešnom spojení sa zobrazí "Odpojenie". Keď je Dobot pripojený, parametre súradníc sa aktualizujú na pravej strane rozhrania
Na hlavnom softvérovom rozhraní je osem modulov:
· Teaching & Playback: Systém na naučenie Dobota, ako sa pohybovať. Umožňuje Dobotovi vykonávať zaznamenané pohyby manuálnym ovládaním.
· Write & Draw: Ovláda Dobot na písanie, kreslenie alebo laserové gravírovanie.
· DobotBlockly: Učí základné programovanie prostredníctvom puzzle rozhrania. Intuitívne a ľahko pochopiteľné.
· Skript: Upraviť skriptovací jazyk na ovládanie Dobota.
· LeapMotion: Ovládaj Dobota gestom.
· Myš: Ovládaj Dobota myšou.
· LaserEngraving: Gravíruje obrázky, tvary a slová cez bitmapu pomocou Dobota.
· Pridajte viac: Pridajte ešte viac funkcií pre Dobot!
10.1 Lineárny režim
Na základe súradnicového systému osí tela X, Y, Z, pričom počiatok je v strede troch motorov. X, Y, Z je súradnica stredu koncovej plošiny a smer X je kolmý na základňu vpredu, Y je kolmý na základňu doľava a Z je vertikálne nahor. R označuje rotáciu servo-kĺbu vzhľadom na súradnicovú sústavu (proti smeru hodinových ručičiek je kladný smer).
(1) Kliknite na X+,X- a Dobot sa pohybuje pozdĺž X v zápornom alebo kladnom smere;
(2) Kliknite na Y+,Y- a Dobot sa pohybuje pozdĺž Y v negatívnom alebo kladnom smere;
(3) Kliknutím na Z+,Z- sa Dobot pohybuje pozdĺž Z v zápornom alebo kladnom smere;
(4) Kliknite na R+,R- a Dobot sa bude pohybovať pozdĺž R v zápornom alebo kladnom smere.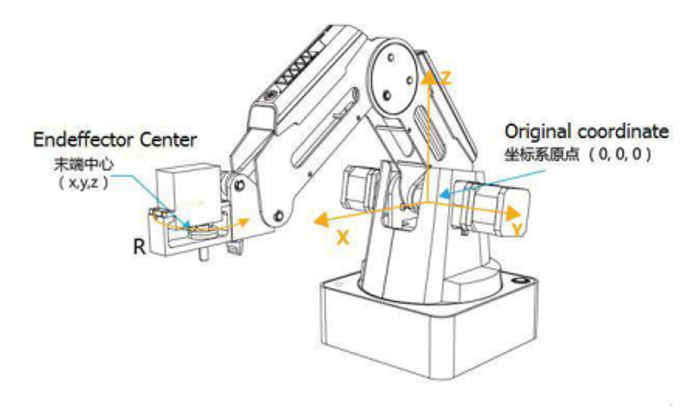
10.2 Režim posunu
Tento pohyb je zameraný na jednu os. Podržte tlačidlo a zodpovedajúca os sa pohybuje nezávisle. Keď je os maximálna, kĺb sa prestane hýbať. Každá os má kladný smer proti smeru hodinových ručičiek. Kĺb1, 2, 3, 4 označujú základňu, zadné rameno, predlaktie a servo.
(1) Kliknúť na kĺb1+、Kĺb1- a ovládať motor základne Dobotu, aby sa otáčal v zápornom alebo kladnom smere;
(2) Kliknúť na kĺb2+、Kĺb2- a motor zadného ramena ovládať, aby sa otáčal v zápornom alebo kladnom smere;
(3) Kliknúť na Joint3+、Joint3- a ovládať motor predlaktia na rotáciu v zápornom alebo kladnom smere;
(4) Kliknúť na Joint4+、Joint4- a ovládať servor na rotáciu v negatívnom alebo kladnom smere; Medzi nimi je rozsah rotácie Joint4 ±150°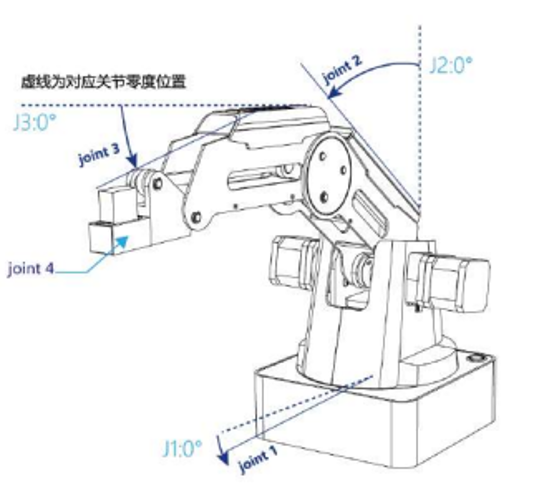
Last modified: Friday, 19 June 2026, 6:27 AM