1.1 Montážny manuál PiRacer
Schéma skrutiek/odstupov
Schéma pre referenciu. Všimnite si, že skrutky, ktoré sú súčasťou servokolia, tu nie sú uvedené.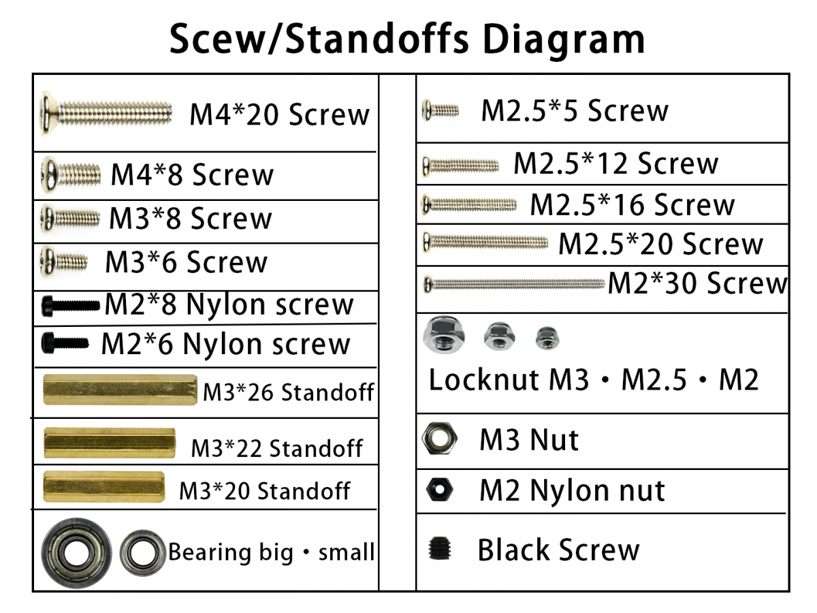
1. Pripevniť motory k kovovému podvozku
Poznámka: Nepoužívajte M3*8. Je dlhšia a môže poškodiť motor.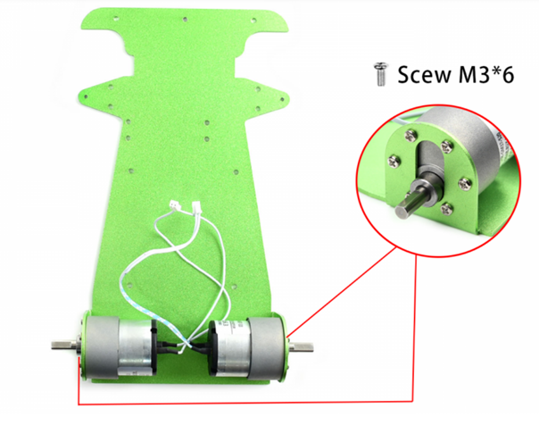
2. Pridať spojky na kolesá
Najprv vložte čiernu skrutku do spojky. Potom pridajte spojku na koleso. Možno budete musieť spojku zatlačiť na koleso. Spojku upevnite k kolesu pomocou skrutky M4*8.

3. Zostaviť kolesá
Dotiahnite čiernu skrutku, aby ste spojku upevnili na plochej strane nápravy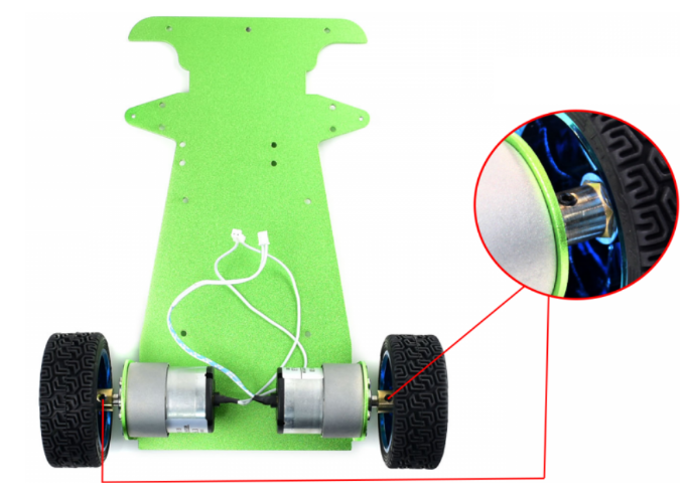
4. Držiak serva namontovať na kovové šasi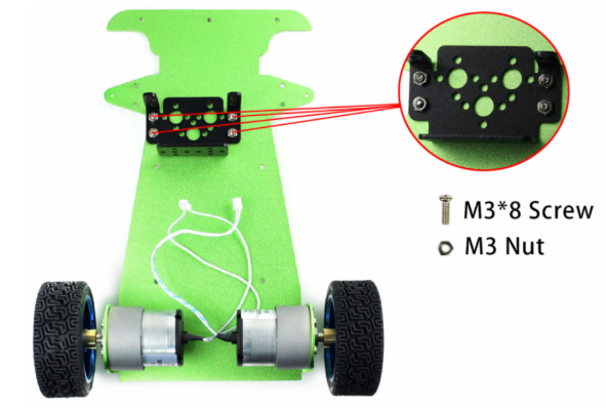
5. Pripevniť servo na držiak pomocou skrutiek a matíc
Uistite sa, že je servo správne zasunuté. Vonkajší hriadeľ by mal byť v strede.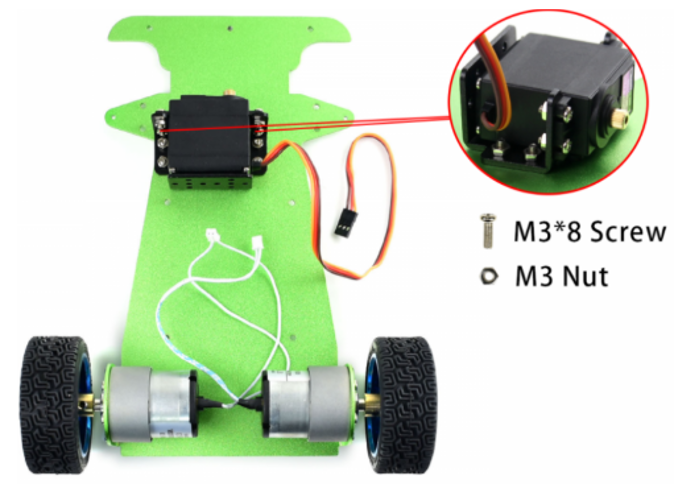
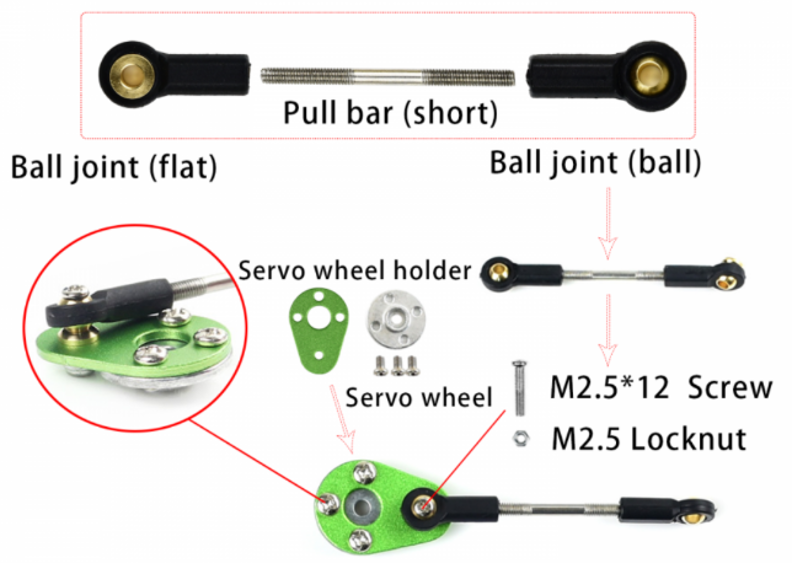
6. Zostaviť servo ťahadlovú tyč
Ťahacia tyč je kombinovaná pomocou dvoch guľových čapov, jedného plochého a jedného guľového, a krátkej tyče. Dva guľové čapy by mali byť na seba kolmé. Pripevnite servo koleso (trúbku) na držiak servo kolesa pomocou skrutiek, ktoré boli súčasťou servo kolesa. Potom pripojte plochý guľový čap k držiaku servokolia. Všimnite si, že drážka servokolia je smerom von.
7. Zostaviť ťahalo predného kolesa a riadiace kĺby
Predné ťahadlá sú kombinované s dvoma guľovými čapmi a dlhou tyčou. Potom daj ložiská do riadiacich kĺbov. Každý kĺb potrebuje malé aj veľké ložisko.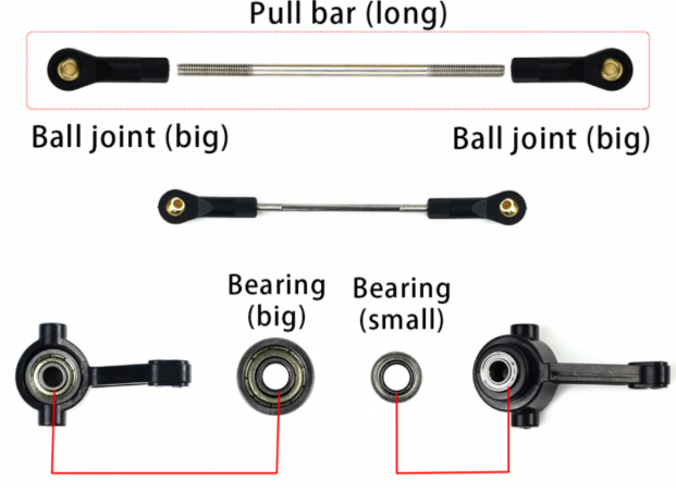
8. Zostaviť servo ťahaciu tyč, prednú ťahaciu tyč a riadiace kĺby
Pripevnite servo ťahadlovú tyč hore, potom predné koleso a nakoniec kĺby. Väčšie ložisko by malo byť bližšie dovnútra.
9. Pripevnite kolesá na riadiaci kĺb
Matica by mala byť na vonkajšej strane kolesa, oproti kĺbu. Uistite sa, že koliesko nie je príliš tesné ani príliš voľné. Otestujte koleso, či sa môže voľne pohybovať.
10. Pridajte odstojníky M3 pre predné kolesá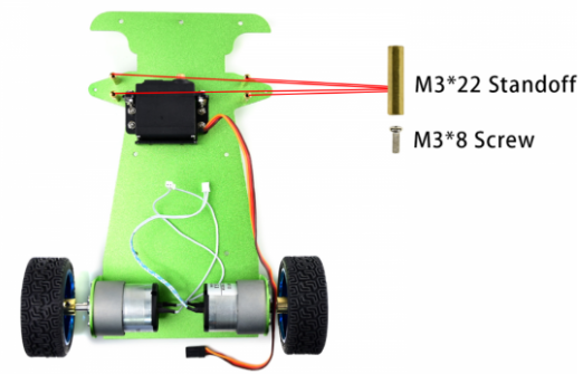
11. Zostaviť kombináciu predných kolies
Polož servo koleso na servo, upevni ho skrutkou M3. Kolesá upevnite skrutkami M2, maticou a trojuholníkovou doskou. Predné kolesá by mali byť rovné dopredu. Ak je to potrebné, upravte dlhú ťahaciu tyč.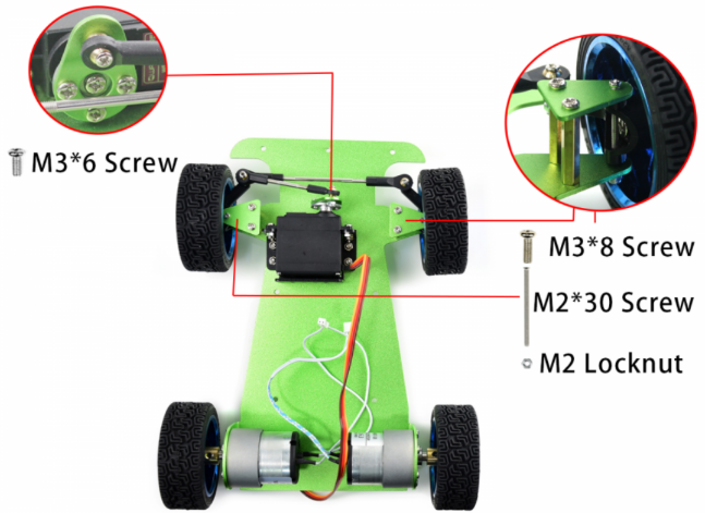
Predné kolesá by mali byť rovné dopredu. Ak je to potrebné, upravte dlhú ťahaciu tyč.
12. Pridaj diaľkové odstupy pre rozšíriacu dosku PiRacer a nárazník
Vložte EVA filcové podložky na nárazník a rozširujúcu dosku PiRacer.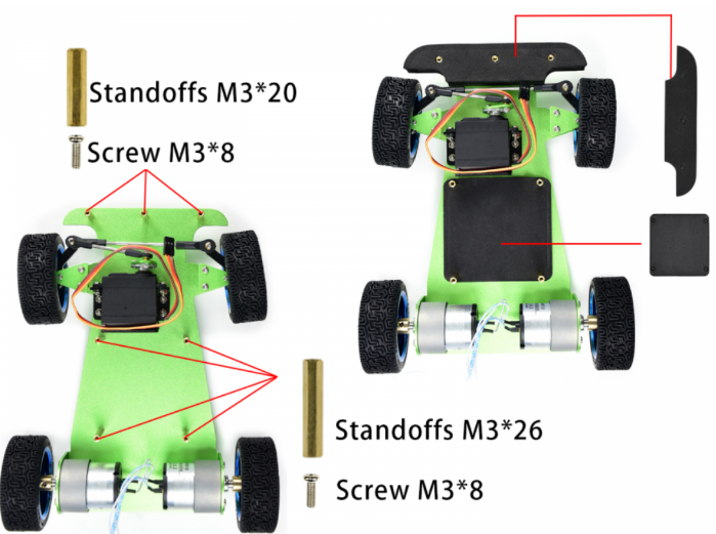
13. Pripojte držiak fotoaparátu na rozširujúcu dosku PiRacer.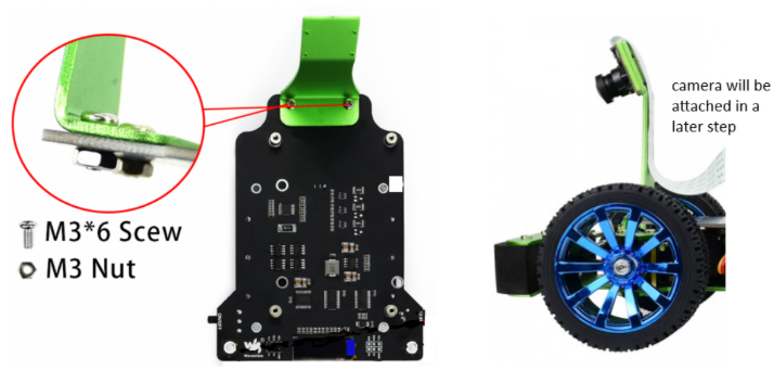
14. Vložte batérie správnym smerom
Pripojte vodiče motorov a servo k rozširujúcej doske PiRacer.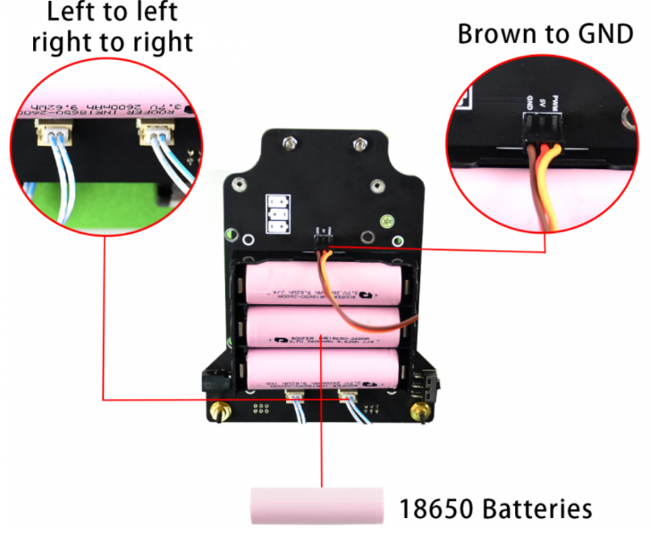
15. Pripojte rozširnú dosku a kovový nárazník
Upravte umiestnenie vodičov motora a servo vodičov, pripevnite rozširujúcu dosku PiRacer na kovové šasi a pripevnite kovový nárazník.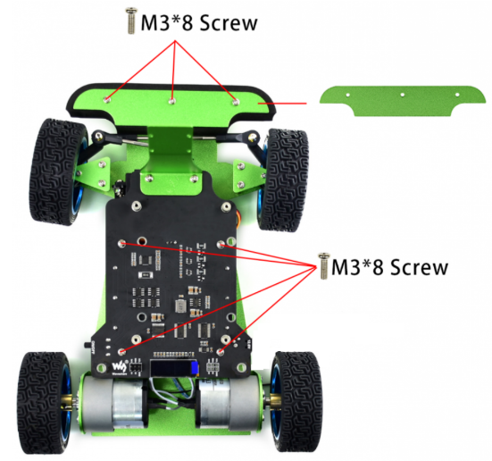
16. Pripevniť fotoaparát na držiak pomocou nylonových skrutiek
Poznámka: Akrylová doska by mala byť medzi fotoaparátom a kovovým držiakom, aby sa predišlo skratu.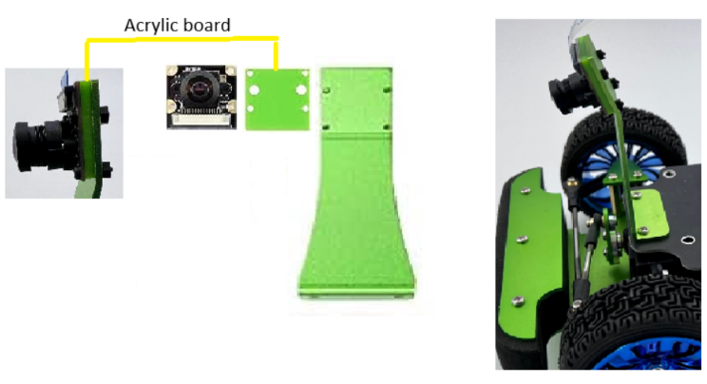
17. Pripojte 3D tlačený kryt motora na jednosmerné motory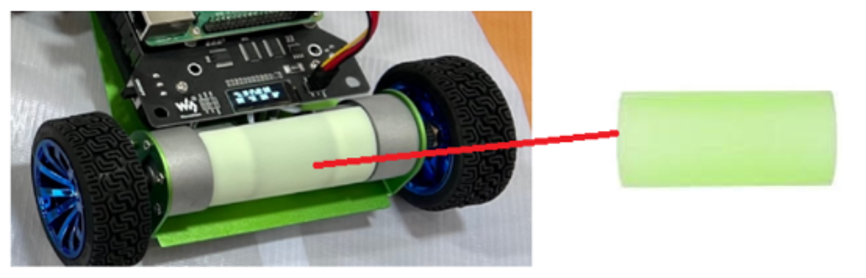
18. Pred pokračovaním vypnite Raspberry Pi a odpojte nabíjačku z rozširujúcej dosky PiRacer.
19. Pripojte Raspberry Pi na rozšíriacu dosku PiRacer
GPIO piny by mali byť vzadu na aute.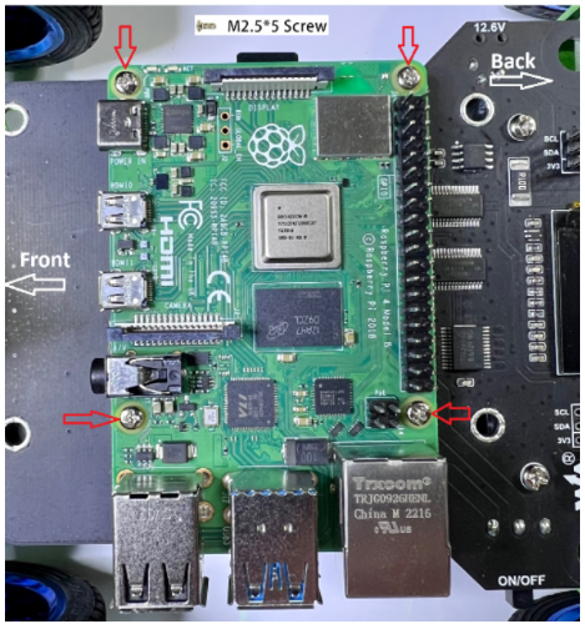
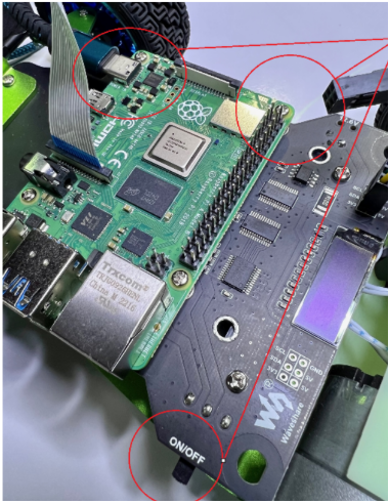
21. Pripojte páskový kábel kamery k vstupu kamery Raspberry Pi
Modrá strana smerom k USB portom Pi.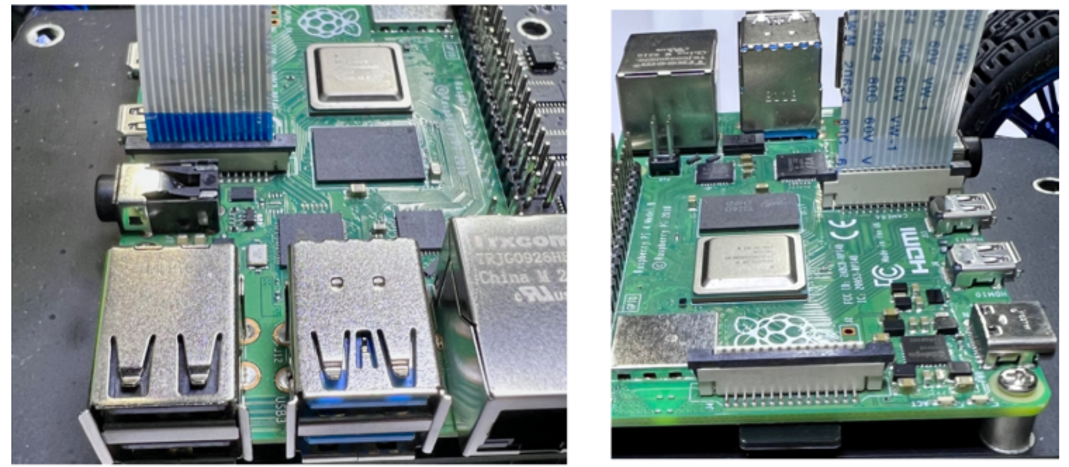
**UPOZORNENIE** Uistite sa, že Raspberry Pi nie je napájané pri pripájaní 6-pinových vodičov
Tiež nenapájajte Raspberry Pi cez USB-C (externé napájanie), keď je napájané rozširujúcou doskou PiRacer.
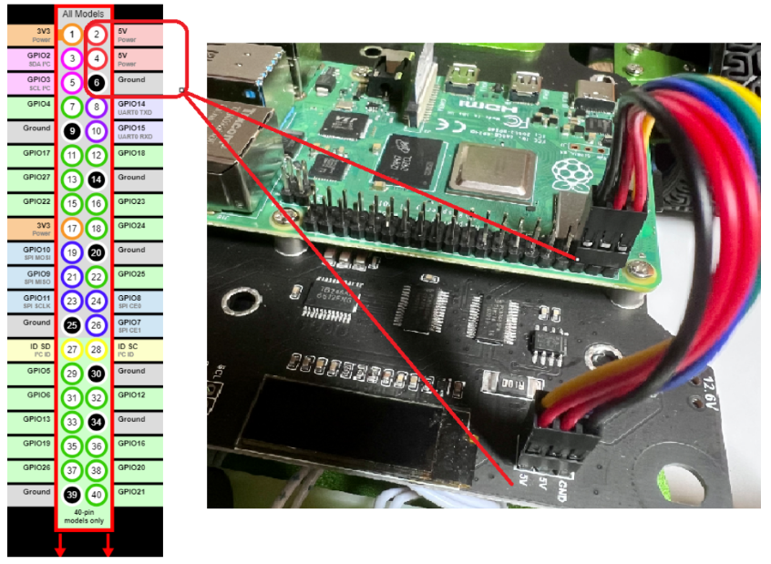
22. Pripojiť Raspberry Pi k rozšíriavacej doske PiRacer pomocou 6-pinových vodičov
Zladiť červenú|červenú|čiernu (5V|zem) na Pi GPIO a čiernu|červenú|červenú (gnd|5V|5V) na rozšírovacej doske PiRacer.
1.2 Raspian Legacy (Buster) Desktop
Flash OS - Raspian Legacy (Buster) Desktop
Prejdite do oficiálneho repozitára na stiahnutie Buster OS. Všetky staršie verzie Raspberry Pi OS nájdete a stiahnete tu a oficiálny odkaz na stiahnutie predchádzajúceho Raspberry Pi 'Buster' OS je tu. Nižšie sa pozrite, ako to vyzerá, stiahnite si obrázok kliknutím na zvýraznený súbor. 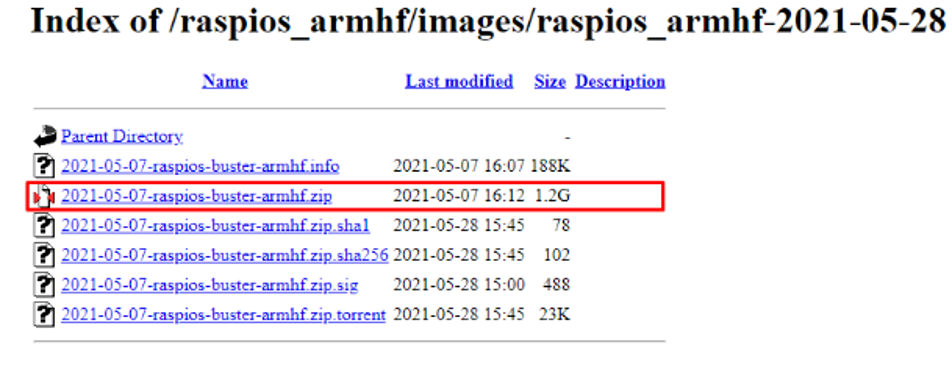
Stiahnite a nainštalujte Raspberry Pi Imager z https://www.raspberrypi.com/software/
Teraz otvorme oficiálny Raspberry Pi Imager, pozrite si ho na obrázku nižšie. Stojí za zmienku – ak narazíte na | CTRL+SHIFT+X | na klávesnici počas používania programu Raspberry Pi Imager sa otvorí Pokročilé skryté menu. Toto skryté menu vám umožňuje predkonfigurovať Raspberry Pi pomocou SSH, WIFI prihlasovacích údajov a nastavení lokalizácie.
Keď to urobíte, otvorí sa prehliadač súborov. Prejdi na ten extrahovaný súbor obrazu disku a klikni naň. Pozrite si to na obrázku nižšie. Potom otvorte obrázok súboru a tým sa Raspberry Pi Imager vybaví operačným systémom Raspberry Pi 'Buster'. Nájdite ho, vyberte a otvorte.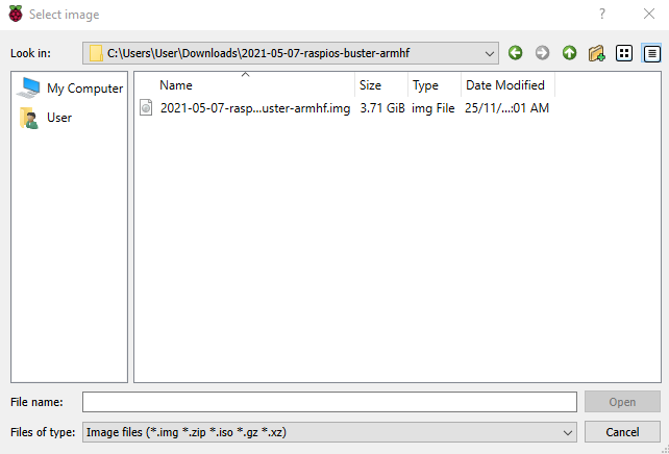
Vlož Micro-SD kartu, ktorú chceš nahrať do počítača. Ak je to potrebné, použite adaptér USB na Micro-SD. Potom kliknite na | VYBERTE ÚLOŽISKO | a vyberte vloženú Micro-SD kartu. Majte na pamäti, že všetky dáta na vašej Micro-SD karte budú pri flashovaní vymazané alebo trvalo vymazané. Oficiálny Raspberry Pi Imager bude teraz vyzerať ako na obrázku nižšie.
Keď je všetko zoradené (správny operačný systém načítaný a správne úložisko vybrané), môžete teraz kliknúť na | WRITE | tlačidlo na spustenie procesu blikania. Pozrite si tento proces blikania na obrázku nižšie.
Keď je blesk dokončený, automaticky virtuálne vysunie Micro-SD kartu z počítača. Takže potom môžete jednoducho fyzicky vybrať svoju Micro-SD kartu a vložiť ju do Raspberry Pi jednodoskového počítača. Potom nastavte Raspberry Pi normálne ako stolný počítač. Po spustení vás privíta staré známe pozadie, pozri obrázok nižšie, a úspešne ste nainštalovali 'Buster' OS na svoj Raspberry Pi. Teraz ste slobodní pohybovať sa po dobre známom digitálnom prostredí.
Postupujte podľa pokynov Pi Wizard na nastavenie polohy, klávesnice, wifi a získajte aktualizáciu
Menu / Preferencie / Konfigurácia Raspberry Pi / Rozhrania
· povoliť kameru a I2C
· voliteľné: povoliť VNC pre vzdialený prístup
· Kliknite OK a reštartujte
Dodatočný softvér
Java 3.8.3 (spúšťaj po jednom)
Sudo APT install build-essential libncurses5-dev libgdbm-dev libnss3-dev libssl-dev libreadline-dev libffi-dev -y
WGET https://www.Python.org/ftp/python/3.8.3/Python-3.8.3.tgz
tar -zxvf Python-3.8.3.tgz
cd Python-3.8.3
sudo ./configure --enable-optimizations
sudo make -j 4
sudo make altinstall
Sudo python3.8 -m pip install boto3
sudo python3.8 -m pip install tqdm
Ďalšie nástroje
sudo apt install chromium-browser -y
sudo apt-get install zip unzip -y
AWS CLI
Predvolené používateľské účty na Raspberry Pi
sudo apt install awscli -y
Sudo Pip3 Install --Upgrade AWSCLI
Sudo Pip3 Install Boto3
Používateľ - Pi
PW - Raspberry
1.3 WaveShare vetva pre softvér DonkeyCar
Inštalačné závislosti
sudo apt-get install build-essential python3 python3-dev python3-pip
python3-virtualenv python3-numpy python3-picamera python3-pandas
python3-rpi.GPIO i2c-tools avahi-utils joystick libopenjp2-7-dev
libtiff5-dev gfortran libatlas-base-dev libopenblas-dev
libhdf5-serial-dev git ntp -y
Voliteľné?
Sudo apt-get install libilmbase-dev libopenexr-dev libgstreamer1.0-dev
libjasper-dev libwebp-dev libatlas-base-dev libavcodec-dev libavformat-dev
libswscale-dev libqtgui4 libqt4-test -y
Nastavenie virtuálneho prostredia
python3 -m virtualenv -p python3 env --system-site-packages
Echo "source ~/env/bin/activate" >> ~/.BASHRC
zdroj ~/.BASHRC
Nainštalujte DonkeyCar Python kód - vetva WaveShare pre softvér DonkeyCar 3.1.0
projekty mkdir
CD projekty
Git klon https://github.com/waveshare/donkeycar
CD Donkeycar
git checkout master
pip install -e .[pi]
Pip install tensorflow==1.13.1
Nie je potrebné pip install numpy --upgrade
pip install protobuf==3.20.*
Testová verzia tensorflow - mala by ukazovať verziu 1.13.1
python -c "import tensorflow; print(tensorflow.__version__)"
POZNÁMKA: Model na aute nebolo možné bežať, kým som nepoužil nasledujúce dva modely
Pip inštalácia https://github.com/lhelontra/tensorflow-on-arm/releases/download/v2.2.0/
tensorflow-2.2.0-cp37-none-linux_armv7l .whl
Pip install tensorflow==1.13.1
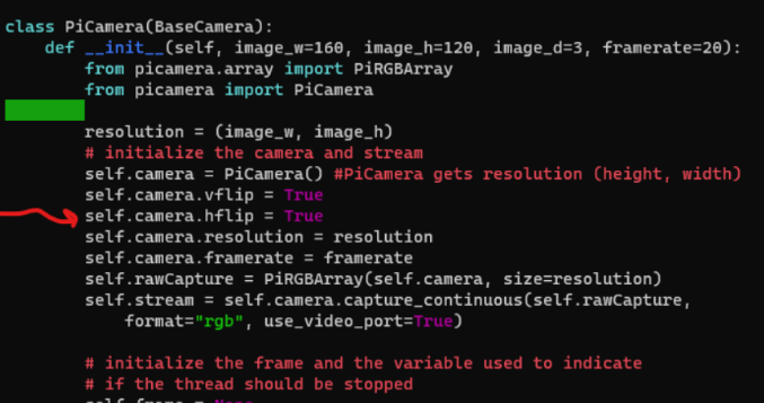
Edit camera.py pridať self.camera.hflip = True
sudo nano /domov/pi/projekty/donkeycar/donkeycar/diely/kamera.py
Voliteľná inštalácia OpenCV
sudo apt install python3-opencv -y
Testujte s:
python -c "import cv2"
1.4 Začiatky s DonkeyCar
Otvorte okno terminálu, zadajte nasledujúci príkaz
Create DonkeyCar App
Tým sa vytvorí priečinok s názvom mycar so všetkým python kódom potrebným na jazdu auta.
Kalibrujte predné riadenie
Uistite sa, že vaše auto je nad zemou, aby ste predišli situácii bez kontroly.
Použi malú krabičku, ako bola na Raspberry Pi.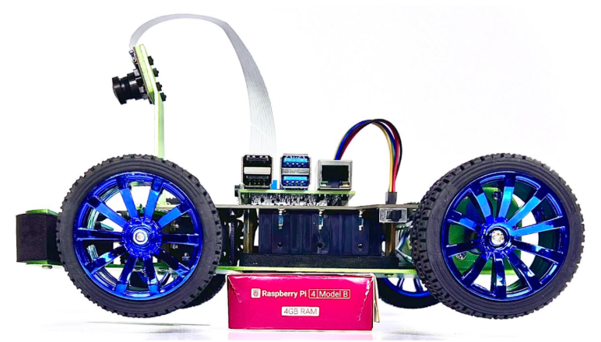
Aby DonkeyCar mohol jazdiť rovno a robiť potrebné zákruty na trati, je potrebné kalibrovať hardvér a softvér auta.
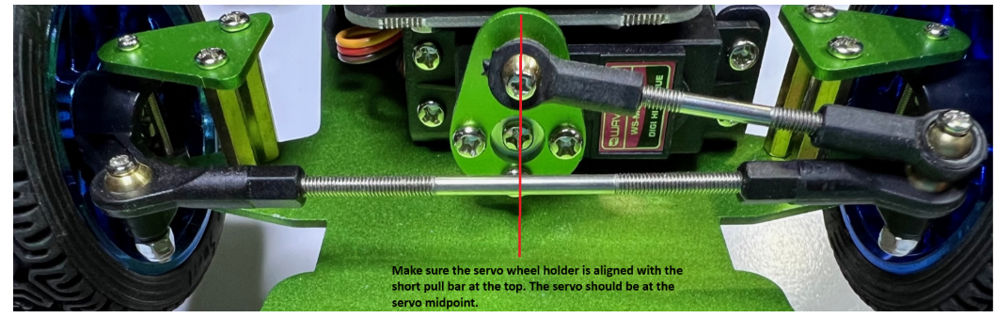
Predné kolesá by mali byť rovné dopredu. Ak je to potrebné, upravte dlhú ťahadlovú tyč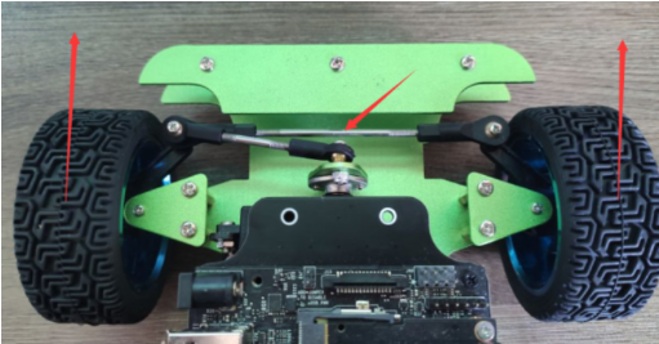
Držiak servo kolies by mal byť zarovnaný s krátkou ťahadlovou tyčou hore. Ak treba, nastavte krátku ťahačku.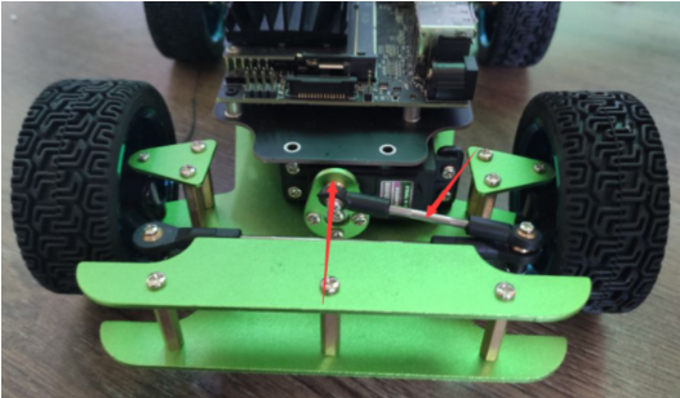
Kalibrujte servo softvér
Nájdite ľavý, stredný a pravý riadiaci PWM pre servo tohto auta.
Stred by mal byť v polovici cesty medzi ľavou a pravou stranou. Príklad:
Ľavý 200
pravá 560
Centrum bude 380
V terminálovom okne vstúpte nasledujúce
cd ~/mycar
Donkey kalibruj --kanál 0 --zbernica=1
Skús hodnoty 300, 400, 500 a uvidíš, ako sa mení riadenie. Zistite si maximálny počet otáčok doľava a doprava.
Keď budete mať čísla, upravte config.py a aktualizujte hodnoty, ktoré ste našli.
Plyn by mal byť nastavený podľa vašich čísel pre riadenie. Plyn je už správne nastavený.
Nano config.py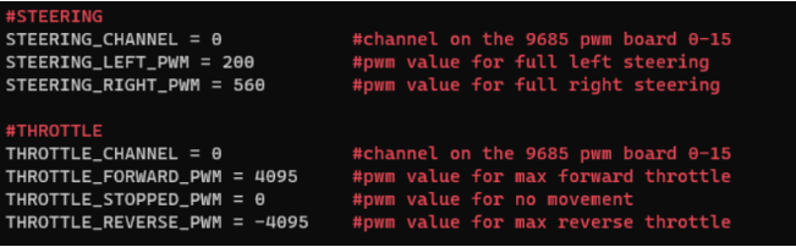
Inštalácia OLED zobrazovacej služby
cd ~
Git klon https://github.com/waveshare/pi-display
CD Pi-displej
sudo ./install.sh
cd ~
Last modified: Friday, 19 June 2026, 6:12 AM